 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey on Blockchain Technology and Its Potential Applications in Distributed Control and Cooperative Robots
Dec 20, 2018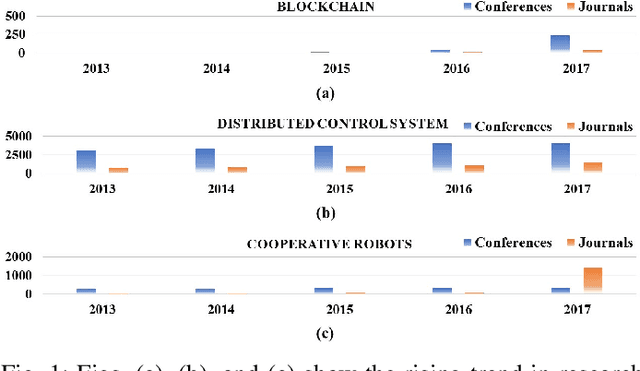
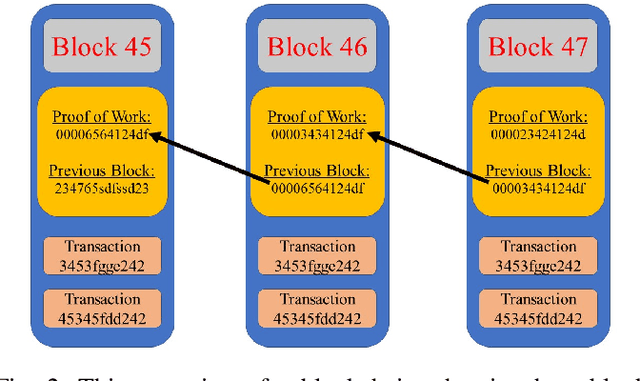


As a disruptive technology, blockchain, particularly its original form of bitcoin as a type of digital currency, has attracted great attentions. The innovative distributed decision making and security mechanism lay the technical foundation for its success, making us consider to penetrate the power of blockchain technology to distributed control and cooperative robotics, in which the distributed and secure mechanism is also highly demanded. Actually, security and distributed communication have long been unsolved problems in the field of distributed control and cooperative robotics. It has been reported on the network failure and intruder attacks of distributed control and multi-robotic systems. Blockchain technology provides promise to remedy this situation thoroughly. This work is intended to create a global picture of blockchain technology on its working principle and key elements in the language of control and robotics, to provide a shortcut for beginners to step into this research field.
Model-Free Optimization Using Eagle Perching Optimizer
Jul 08, 2018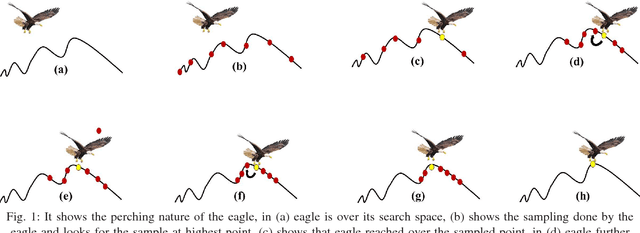
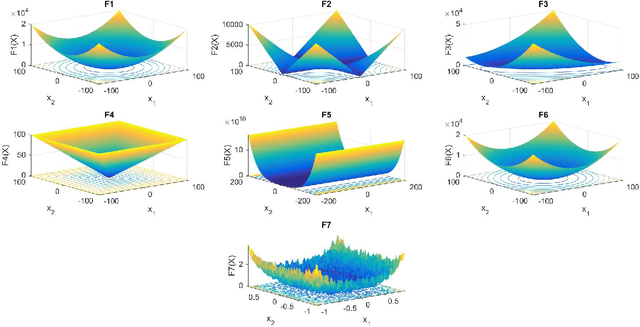
The paper proposes a novel nature-inspired technique of optimization. It mimics the perching nature of eagles and uses mathematical formulations to introduce a new addition to metaheuristic algorithms. The nature of the proposed algorithm is based on exploration and exploitation. The proposed algorithm is developed into two versions with some modifications. In the first phase, it undergoes a rigorous analysis to find out their performance. In the second phase it is benchmarked using ten functions of two categories; uni-modal functions and multi-modal functions. In the third phase, we conducted a detailed analysis of the algorithm by exploiting its controlling units or variables. In the fourth and last phase, we consider real world optimization problems with constraints. Both versions of the algorithm show an appreciable performance, but analysis puts more weight to the modified version. The competitive analysis shows that the proposed algorithm outperforms the other tested metaheuristic algorithms. The proposed method has better robustness and computational efficiency.