 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Like Autonomous Driving on Dense Traffic
Oct 03, 2023



This paper proposes a imitation learning model for autonomous driving on highway traffic by mimicking human drivers' driving behaviours. The study utilizes the HighD traffic dataset, which is complex, high-dimensional, and diverse in vehicle variations. Imitation learning is an alternative solution to autonomous highway driving that reduces the sample complexity of learning a challenging task compared to reinforcement learning. However, imitation learning has limitations such as vulnerability to compounding errors in unseen states, poor generalization, and inability to predict outlier driver profiles. To address these issues, the paper proposes mixture density network behaviour cloning model to manage complex and non-linear relationships between inputs and outputs and make more informed decisions about the vehicle's actions. Additional improvement is using collision penalty based on the GAIL model. The paper includes a simulated driving test to demonstrate the effectiveness of the proposed method based on real traffic scenarios and provides conclusions on its potential impact on autonomous driving.
Towards One-Shot Learning for Text Classification using Inductive Logic Programming
Aug 30, 2023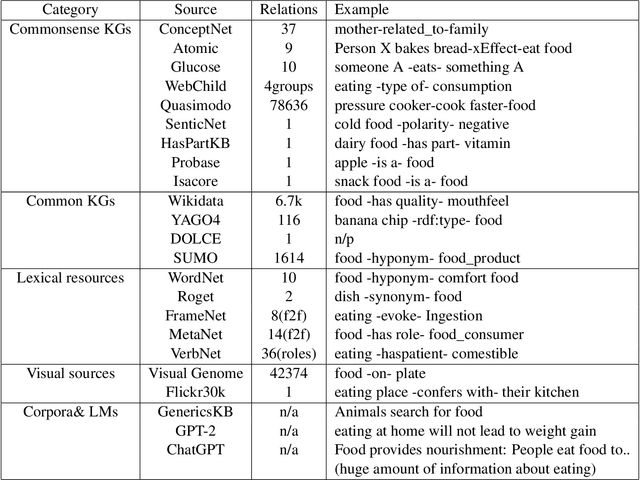



With the ever-increasing potential of AI to perform personalised tasks, it is becoming essential to develop new machine learning techniques which are data-efficient and do not require hundreds or thousands of training data. In this paper, we explore an Inductive Logic Programming approach for one-shot text classification. In particular, we explore the framework of Meta-Interpretive Learning (MIL), along with using common-sense background knowledge extracted from ConceptNet. Results indicate that MIL can learn text classification rules from a small number of training examples. Moreover, the higher complexity of chosen examples, the higher accuracy of the outcome.
* In Proceedings ICLP 2023, arXiv:2308.14898
Explainable and Trustworthy Traffic Sign Detection for Safe Autonomous Driving: An Inductive Logic Programming Approach
Aug 30, 2023

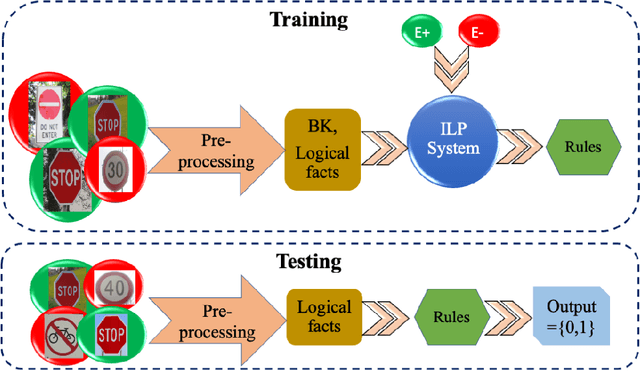

Traffic sign detection is a critical task in the operation of Autonomous Vehicles (AV), as it ensures the safety of all road users. Current DNN-based sign classification systems rely on pixel-level features to detect traffic signs and can be susceptible to adversarial attacks. These attacks involve small, imperceptible changes to a sign that can cause traditional classifiers to misidentify the sign. We propose an Inductive Logic Programming (ILP) based approach for stop sign detection in AVs to address this issue. This method utilises high-level features of a sign, such as its shape, colour, and text, to detect categories of traffic signs. This approach is more robust against adversarial attacks, as it mimics human-like perception and is less susceptible to the limitations of current DNN classifiers. We consider two adversarial attacking methods to evaluate our approach: Robust Physical Perturbation (PR2) and Adversarial Camouflage (AdvCam). These attacks are able to deceive DNN classifiers, causing them to misidentify stop signs as other signs with high confidence. The results show that the proposed ILP-based technique is able to correctly identify all targeted stop signs, even in the presence of PR2 and ADvCam attacks. The proposed learning method is also efficient as it requires minimal training data. Moreover, it is fully explainable, making it possible to debug AVs.
* In Proceedings ICLP 2023, arXiv:2308.14898