 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-task Recurrent Neural Networks to Simultaneously Infer Mode and Purpose in GPS Trajectories
Oct 23, 2021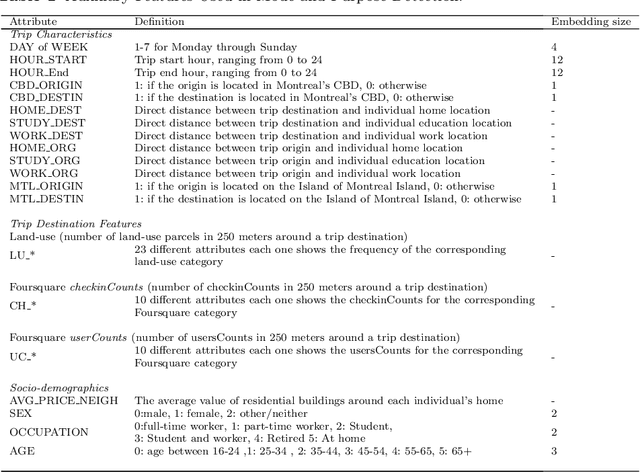
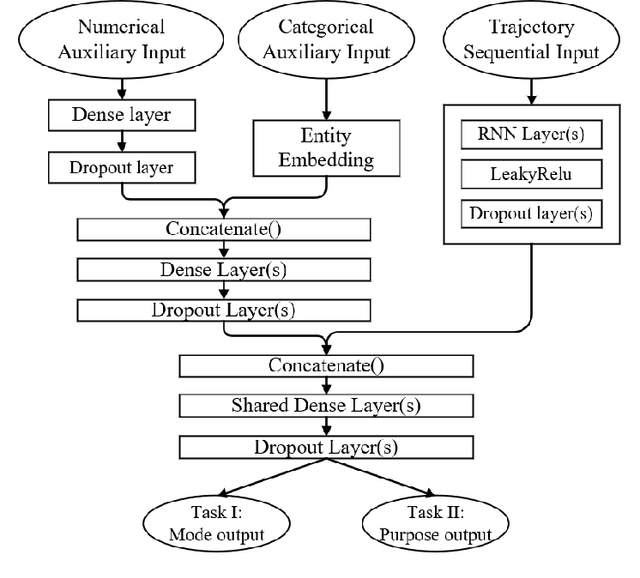


Multi-task learning is assumed as a powerful inference method, specifically, where there is a considerable correlation between multiple tasks, predicting them in an unique framework may enhance prediction results. This research challenges this assumption by developing several single-task models to compare their results against multi-task learners to infer mode and purpose of trip from smartphone travel survey data collected as part of a smartphone-based travel survey. GPS trajectory data along with socio-demographics and destination-related characteristics are fed into a multi-input neural network framework to predict two outputs; mode and purpose. We deployed Recurrent Neural Networks (RNN) that are fed by sequential GPS trajectories. To process the socio-demographics and destination-related characteristics, another neural network, with different embedding and dense layers is used in parallel with RNN layers in a multi-input multi-output framework. The results are compared against the single-task learners that classify mode and purpose independently. We also investigate different RNN approaches such as Long-Short Term Memory (LSTM), Gated Recurrent Units (GRU) and Bi-directional Gated Recurrent Units (Bi-GRU). The best multi-task learner was a Bi-GRU model able to classify mode and purpose with an F1-measures of 84.33% and 78.28%, while the best single-task learner to infer mode of transport was a GRU model that achieved an F1-measure of 86.50%, and the best single-task Bi-GRU purpose detection model that reached an F1-measure of 77.38%. While there's an assumption of higher performance of multi-task over sing-task learners, the results of this study does not hold such an assumption and shows, in the context of mode and trip purpose inference from GPS trajectory data, a multi-task learning approach does not bring any considerable advantage over single-task learners.
Smart Mobility Ontology: Current Trends and Future Directions
Dec 15, 2020



Ontology is the explicit and formal representation of the concepts in a domain and relations among them. Transportation science is a wide domain dealing with mobility over various complex and interconnected transportation systems, such as land, aviation, and maritime transport, and can take considerable advantage from ontology development. While several studies can be found in the recent literature, there exists a large potential to improve and develop a comprehensive smart mobility ontology. The current chapter aims to present different aspects of ontology development in general, such as ontology development methods, languages, tools, and software. Subsequently, it presents the currently available mobility-related ontologies developed across different domains, such as transportation, smart cities, goods mobility, sensors. Current gaps in the available ontologies are identified, and future directions regarding ontology development are proposed that can incorporate the forthcoming autonomous and connected vehicles, mobility as a service (MaaS), and other disruptive transportation technologies and services.
Ensemble Convolutional Neural Networks for Mode Inference in Smartphone Travel Survey
Apr 18, 2019
We develop ensemble Convolutional Neural Networks (CNNs) to classify the transportation mode of trip data collected as part of a large-scale smartphone travel survey in Montreal, Canada. Our proposed ensemble library is composed of a series of CNN models with different hyper-parameter values and CNN architectures. In our final model, we combine the output of CNN models using "average voting", "majority voting" and "optimal weights" methods. Furthermore, we exploit the ensemble library by deploying a Random Forest model as a meta-learner. The ensemble method with random forest as meta-learner shows an accuracy of 91.8% which surpasses the other three ensemble combination methods, as well as other comparable models reported in the literature. The "majority voting" and "optimal weights" combination methods result in prediction accuracy rates around 89%, while "average voting" is able to achieve an accuracy of only 85%.
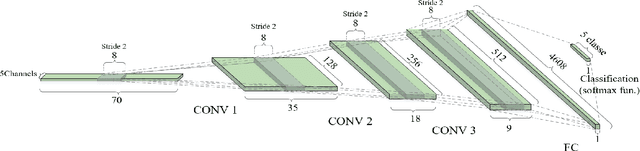
Semi-supervised GANs to Infer Travel Modes in GPS Trajectories
Feb 27, 2019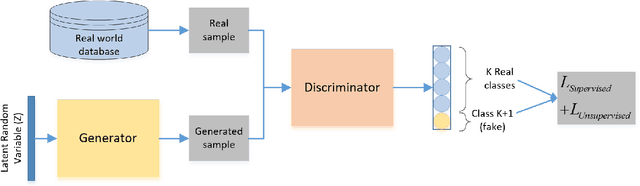
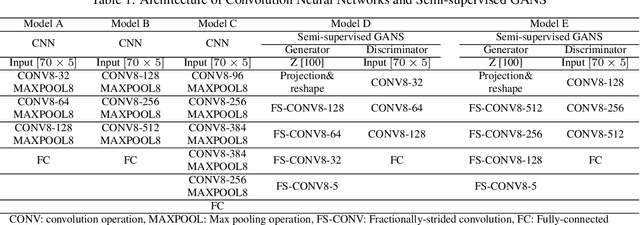
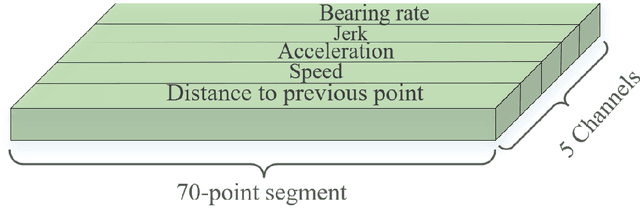
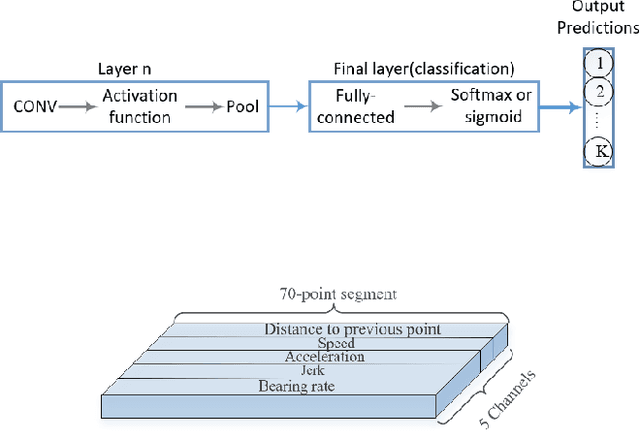
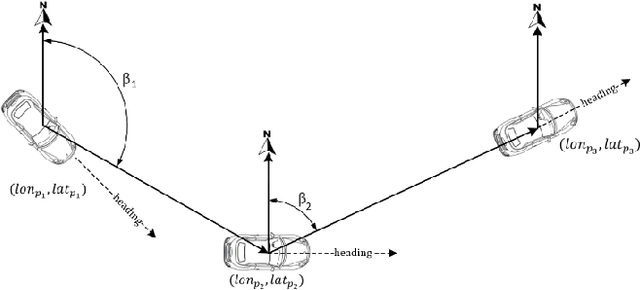
Semi-supervised Generative Adversarial Networks (GANs) are developed in the context of travel mode inference with uni-dimensional smartphone trajectory data. We use data from a large-scale smartphone travel survey in Montreal, Canada. We convert GPS trajectories into fixed-sized segments with five channels (variables). We develop different GANs architectures and compare their prediction results with Convolutional Neural Networks (CNNs). The best semi-supervised GANs model led to a prediction accuracy of 83.4%, while the best CNN model was able to achieve the prediction accuracy of 81.3%. The results compare favorably with previous studies, especially when taking the large-scale real-world nature of the dataset into account.