 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Time Discretization of the Feynman-Kac Forward-Backward Stochastic Differential Equations for Value Function Approximation
Mar 26, 2021
Novel numerical estimators are proposed for the forward-backward stochastic differential equations (FBSDE) appearing in the Feynman-Kac representation of the value function. In contrast to the current numerical method approaches based on discretization of the continuous-time FBSDE results, we propose a converse approach, by first obtaining a discrete-time approximation of the on-policy value function, and then developing a discrete-time result which resembles the continuous-time counterpart. This approach yields improved numerical estimators in the function approximation phase, and demonstrates enhanced error analysis for those value function estimators. Numerical results and error analysis are demonstrated on a scalar nonlinear stochastic optimal control problem, and they show improvements in the performance of the proposed estimators in comparison with the state-of-the-art methodologies.
Forward-Backward RRT: Branched Sampled FBSDEs for Stochastic Optimal Control
Jun 22, 2020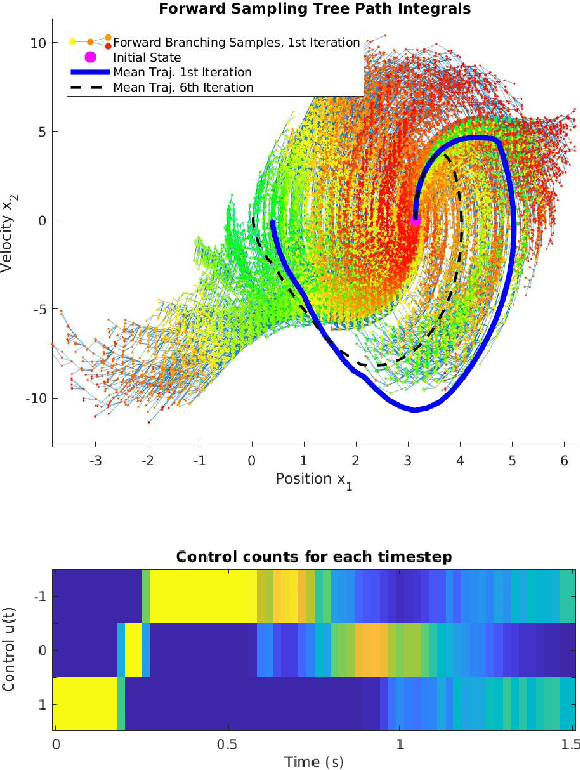
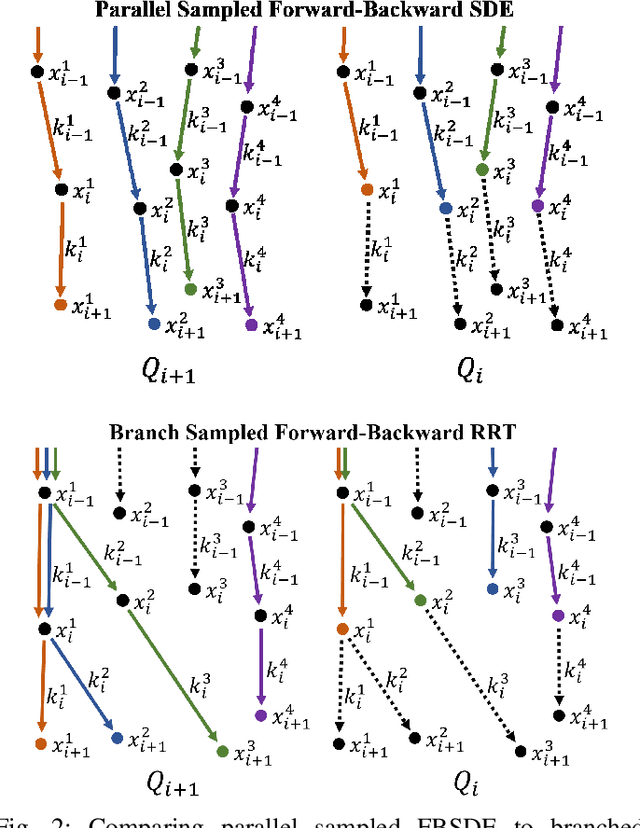
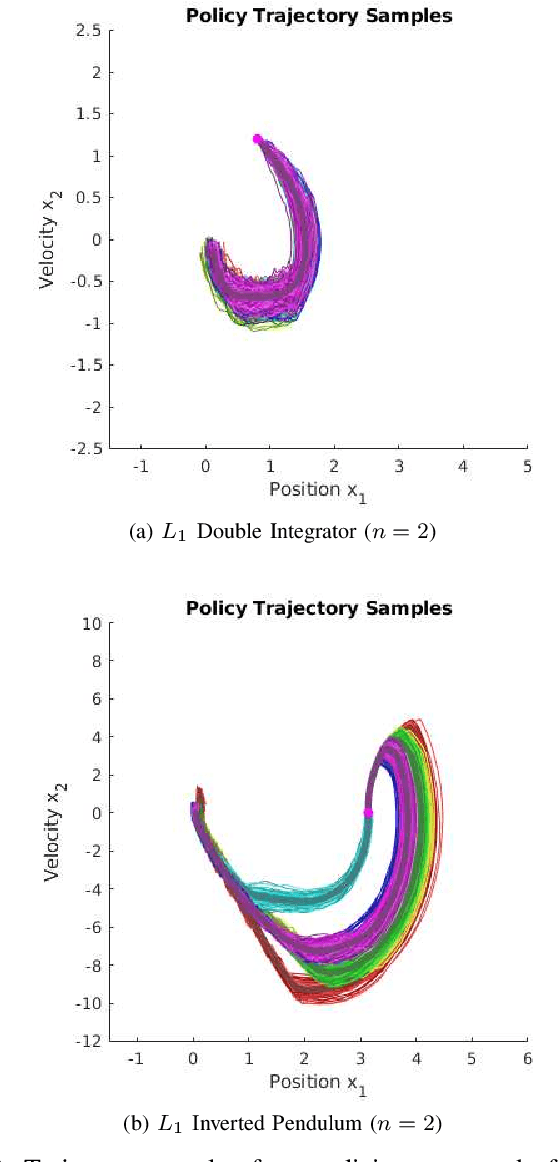
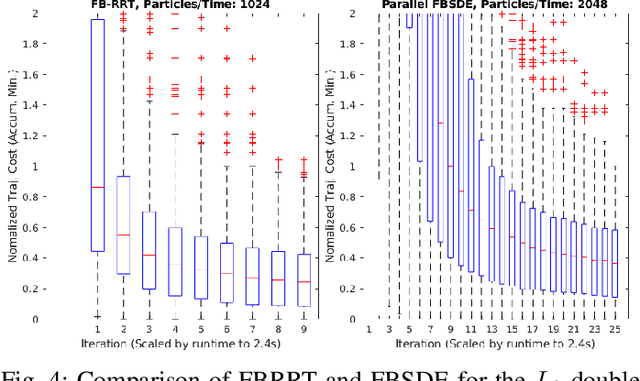
We propose a numerical method to solve forward-backward stochastic differential equations (FBSDE) arising in stochastic optimal control problems. Instead of sampling forward paths independently, we demonstrate how a rapidly-exploring random tree (RRT) method can be utilized for the forward integration pass, as long as the controlled drift terms are appropriately compensated in the backward integration pass. We show how a value function approximation is produced by solving a series of function approximation problems backwards in time along the edges of the constructed RRT tree. We employ a local entropy-weighted least squares Monte Carlo (LSMC) method to concentrate function approximation accuracy in regions most likely to be visited by optimally controlled trajectories. We demonstrate the proposed method and evaluate it on two nonlinear stochastic optimal control problems with non-quadratic running costs, showing that it can greatly improve convergence over previous FBSDE numerical solution methods.