 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTabKAN: Advancing Tabular Data Analysis using Kolmograv-Arnold Network
Apr 09, 2025Tabular data analysis presents unique challenges due to its heterogeneous feature types, missing values, and complex interactions. While traditional machine learning methods, such as gradient boosting, often outperform deep learning approaches, recent advancements in neural architectures offer promising alternatives. This paper introduces TabKAN, a novel framework that advances tabular data modeling using Kolmogorov-Arnold Networks (KANs). Unlike conventional deep learning models, KANs leverage learnable activation functions on edges, enhancing both interpretability and training efficiency. Our contributions include: (1) the introduction of modular KAN-based architectures tailored for tabular data analysis, (2) the development of a transfer learning framework for KAN models, enabling effective knowledge transfer between domains, (3) the development of model-specific interpretability for tabular data learning, reducing reliance on post hoc and model-agnostic analysis, and (4) comprehensive evaluation of vanilla supervised learning across binary and multi-class classification tasks. Through extensive benchmarking on diverse public datasets, TabKAN demonstrates superior performance in supervised learning while significantly outperforming classical and Transformer-based models in transfer learning scenarios. Our findings highlight the advantage of KAN-based architectures in efficiently transferring knowledge across domains, bridging the gap between traditional machine learning and deep learning for structured data.
TabNSA: Native Sparse Attention for Efficient Tabular Data Learning
Mar 12, 2025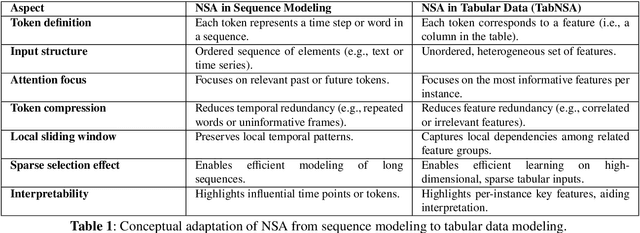



Tabular data poses unique challenges for deep learning due to its heterogeneous features and lack of inherent spatial structure. This paper introduces TabNSA, a novel deep learning architecture leveraging Native Sparse Attention (NSA) specifically for efficient tabular data processing. TabNSA incorporates a dynamic hierarchical sparse strategy, combining coarse-grained feature compression with fine-grained feature selection to preserve both global context awareness and local precision. By dynamically focusing on relevant subsets of features, TabNSA effectively captures intricate feature interactions. Extensive experiments demonstrate that TabNSA consistently outperforms existing methods, including both deep learning architectures and ensemble decision trees, achieving state-of-the-art performance across various benchmark datasets.
Comparative Analysis of Transfer Learning Models for Breast Cancer Classification
Aug 29, 2024The classification of histopathological images is crucial for the early and precise detection of breast cancer. This study investigates the efficiency of deep learning models in distinguishing between Invasive Ductal Carcinoma (IDC) and non-IDC in histopathology slides. We conducted a thorough comparison examination of eight sophisticated models: ResNet-50, DenseNet-121, ResNeXt-50, Vision Transformer (ViT), GoogLeNet (Inception v3), EfficientNet, MobileNet, and SqueezeNet. This analysis was carried out using a large dataset of 277,524 image patches. Our research makes a substantial contribution to the field by offering a comprehensive assessment of the performance of each model. We particularly highlight the exceptional efficacy of attention-based mechanisms in the ViT model, which achieved a remarkable validation accuracy of 93\%, surpassing conventional convolutional networks. This study highlights the promise of advanced machine learning approaches in clinical settings, offering improved precision as well as efficiency in breast cancer diagnosis.
Enhanced Unscented Kalman Filter-Based SLAM in Dynamic Environments: Euclidean Approach
Dec 19, 2023This paper introduces an innovative approach to Simultaneous Localization and Mapping (SLAM) using the Unscented Kalman Filter (UKF) in a dynamic environment. The UKF is proven to be a robust estimator and demonstrates lower sensitivity to sensor data errors compared to alternative SLAM algorithms. However, conventional algorithms are primarily concerned with stationary landmarks, which might prevent localization in dynamic environments. This paper proposes an Euclidean-based method for handling moving landmarks, calculating and estimating distances between the robot and each moving landmark, and addressing sensor measurement conflicts. The approach is evaluated through simulations in MATLAB and comparing results with the conventional UKF-SLAM algorithm. We also introduce a dataset for filter-based algorithms in dynamic environments, which can be used as a benchmark for evaluating of future algorithms. The outcomes of the proposed algorithm underscore that this simple yet effective approach mitigates the disruptive impact of moving landmarks, as evidenced by a thorough examination involving parameters such as the number of moving and stationary landmarks, waypoints, and computational efficiency. We also evaluated our algorithms in a realistic simulation of a real-world mapping task. This approach allowed us to assess our methods in practical conditions and gain insights for future enhancements. Our algorithm surpassed the performance of all competing methods in the evaluation, showcasing its ability to excel in real-world mapping scenarios.
Det-SLAM: A semantic visual SLAM for highly dynamic scenes using Detectron2
Oct 01, 2022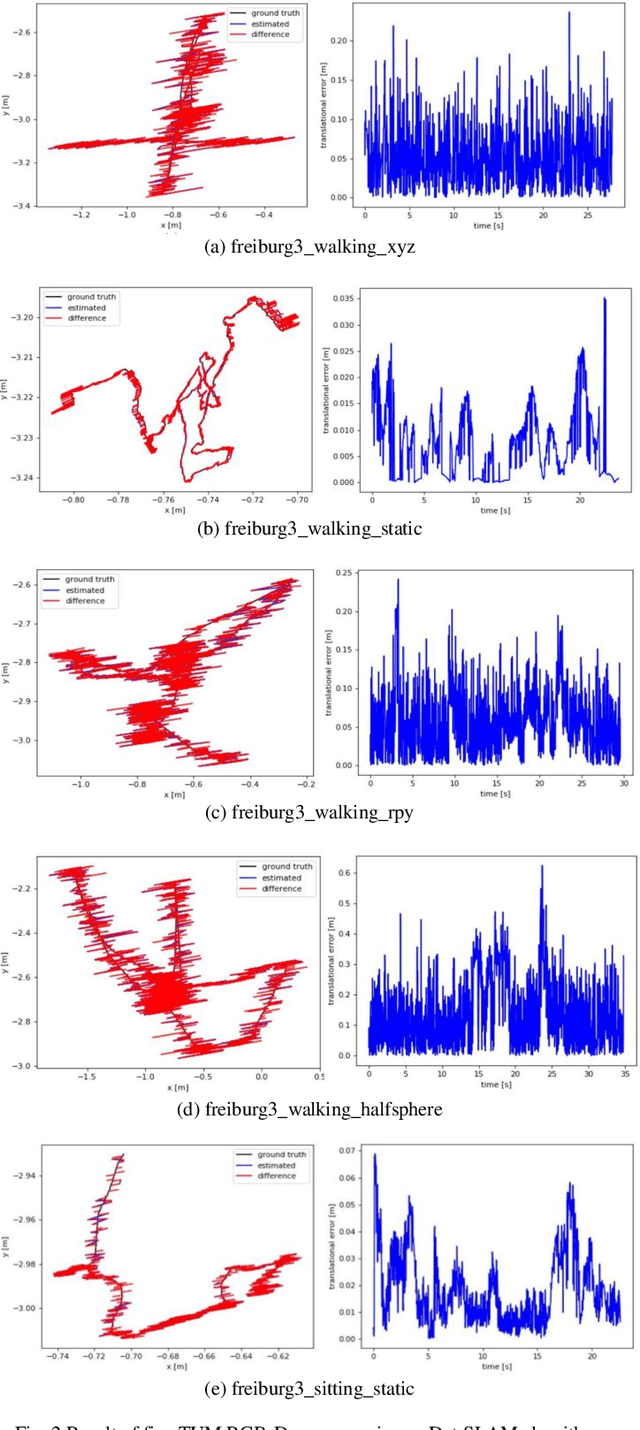
According to experts, Simultaneous Localization and Mapping (SLAM) is an intrinsic part of autonomous robotic systems. Several SLAM systems with impressive performance have been invented and used during the last several decades. However, there are still unresolved issues, such as how to deal with moving objects in dynamic situations. Classic SLAM systems depend on the assumption of a static environment, which becomes unworkable in highly dynamic situations. Several methods have been presented to tackle this issue in recent years, but each has its limitations. This research combines the visual SLAM systems ORB-SLAM3 and Detectron2 to present the Det-SLAM system, which employs depth information and semantic segmentation to identify and eradicate dynamic spots to accomplish semantic SLAM for dynamic situations. Evaluation of public TUM datasets indicates that Det-SLAM is more resilient than previous dynamic SLAM systems and can lower the estimated error of camera posture in dynamic indoor scenarios.