 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectoryNAS: A Neural Architecture Search for Trajectory Prediction
Mar 18, 2024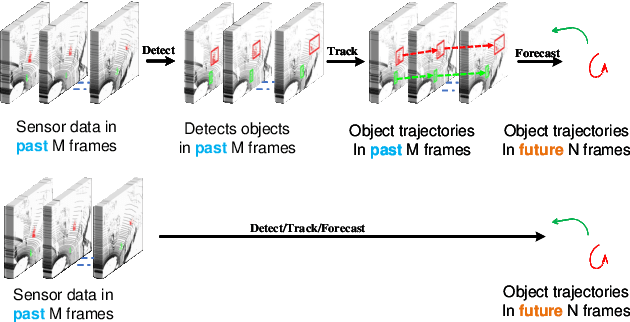

Autonomous driving systems are a rapidly evolving technology that enables driverless car production. Trajectory prediction is a critical component of autonomous driving systems, enabling cars to anticipate the movements of surrounding objects for safe navigation. Trajectory prediction using Lidar point-cloud data performs better than 2D images due to providing 3D information. However, processing point-cloud data is more complicated and time-consuming than 2D images. Hence, state-of-the-art 3D trajectory predictions using point-cloud data suffer from slow and erroneous predictions. This paper introduces TrajectoryNAS, a pioneering method that focuses on utilizing point cloud data for trajectory prediction. By leveraging Neural Architecture Search (NAS), TrajectoryNAS automates the design of trajectory prediction models, encompassing object detection, tracking, and forecasting in a cohesive manner. This approach not only addresses the complex interdependencies among these tasks but also emphasizes the importance of accuracy and efficiency in trajectory modeling. Through empirical studies, TrajectoryNAS demonstrates its effectiveness in enhancing the performance of autonomous driving systems, marking a significant advancement in the field.Experimental results reveal that TrajcetoryNAS yield a minimum of 4.8 higger accuracy and 1.1* lower latency over competing methods on the NuScenes dataset.