 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHands-free teleoperation of a nearby manipulator through a virtual body-to-robot link
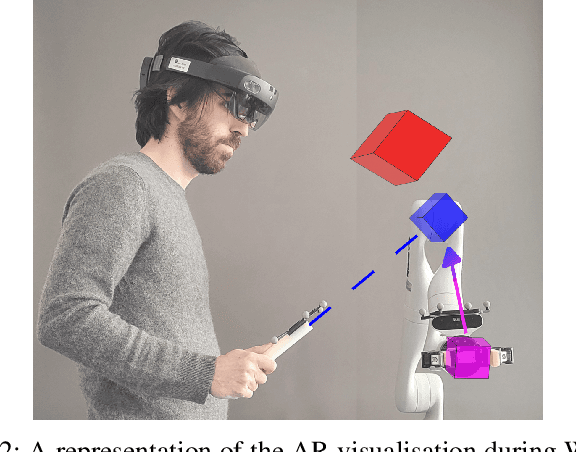
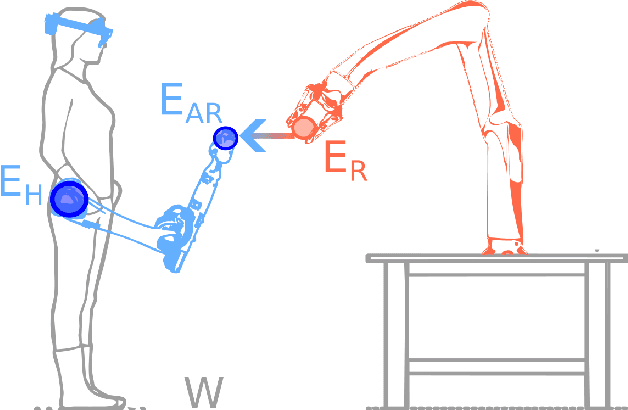
Jun 13, 2024This paper introduces an innovative control approach for teleoperating a robot in close proximity to a human operator, which could be useful to control robots embedded on wheelchairs. The method entails establishing a virtual connection between a specific body part and the robot's end-effector, visually displayed through an Augmented Reality (AR) headset. This linkage enables the transformation of body rotations into amplified effector translations, extending the robot's workspace beyond the capabilities of direct one-to-one mapping. Moreover, the linkage can be reconfigured using a joystick, resulting in a hybrid position/velocity control mode using the body/joystick motions respectively. After providing a comprehensive overview of the control methodology, we present the results of an experimental campaign designed to elucidate the advantages and drawbacks of our approach compared to the conventional joystick-based teleoperation method. The body-link control demonstrates slightly faster task completion and is naturally preferred over joystick velocity control, albeit being more physically demanding for tasks with a large range. The hybrid mode, where participants could simultaneously utilize both modes, emerges as a compromise, combining the intuitiveness of the body mode with the extensive task range of the velocity mode. Finally, we provide preliminary observations on potential assistive applications using head motions, especially for operators with limited range of motion in their bodies.
Teleoperation of a robotic manipulator in peri-personal space: a virtual wand approach
Jun 13, 2024
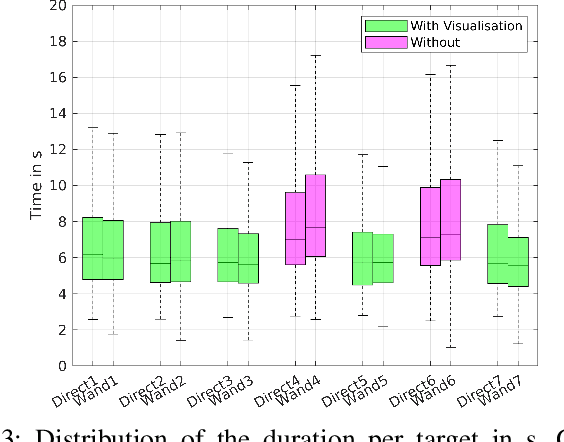
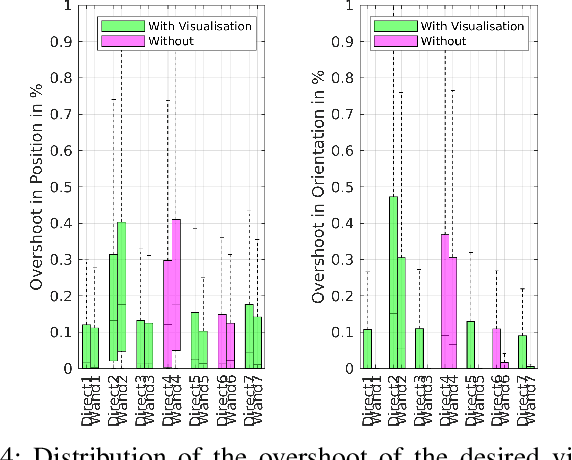
The paper deals with the well-known problem of teleoperating a robotic arm along six degrees of freedom. The prevailing and most effective approach to this problem involves a direct position-to-position mapping, imposing robotic end-effector movements that mirrors those of the user. In the particular case where the robot stands near the operator, there are alternatives to this approach. Drawing inspiration from head pointers utilized in the 1980s, originally designed to enable drawing with limited head motions for tetraplegic individuals, we propose a "virtual wand" mapping. It employs a virtual rigid linkage between the hand and the robot's end-effector. With this approach, rotations produce amplified translations through a lever arm, creating a "rotation-to-position" coupling. This approach expands the translation workspace at the expense of a reduced rotation space. We compare the virtual wand approach to the one-to-one position mapping through the realization of 6-DoF reaching tasks. Results indicate that the two different mappings perform comparably well, are equally well-received by users, and exhibit similar motor control behaviors. Nevertheless, the virtual wand mapping is anticipated to outperform in tasks characterized by large translations and minimal effector rotations, whereas direct mapping is expected to demonstrate advantages in large rotations with minimal translations. These results pave the way for new interactions and interfaces, particularly in disability assistance utilizing head movements (instead of hands). Leveraging body parts with substantial rotations could enable the accomplishment of tasks previously deemed infeasible with standard direct coupling interfaces.
Virtually turning robotic manipulators into worn devices: opening new horizons for wearable assistive robotics
Nov 15, 2022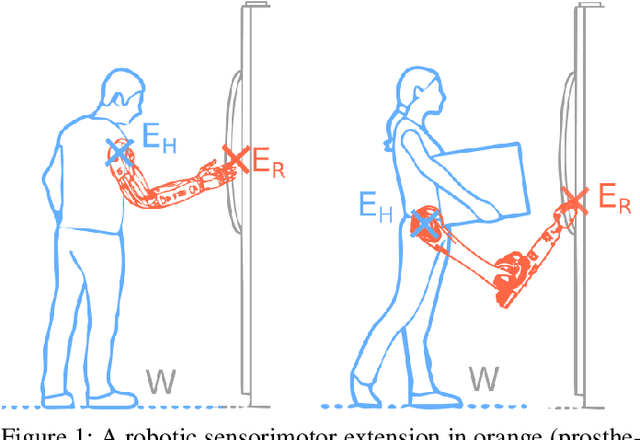

Robotic sensorimotor extensions (supernumerary limbs, prosthesis, handheld tools) are worn devices used to interact with the nearby environment, whether to assist the capabilities of impaired users or to enhance the dexterity of industrial operators. Despite numerous mechanical achievements, embedding these robotics devices remains critical due to their weight and discomfort. To emancipate from these mechanical constraints, we propose a new hybrid system using a virtually worn robotic arm in augmented-reality, and a real robotic manipulator servoed on such virtual representation. We aim at bringing an illusion of wearing a robotic system while its weight is fully deported, thinking that this approach could open new horizons for the study of wearable robotics without any intrinsic impairment of the human movement abilities.