 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCBGL: Fast Monte Carlo Passive Global Localisation of 2D LIDAR Sensor
Jul 28, 2023

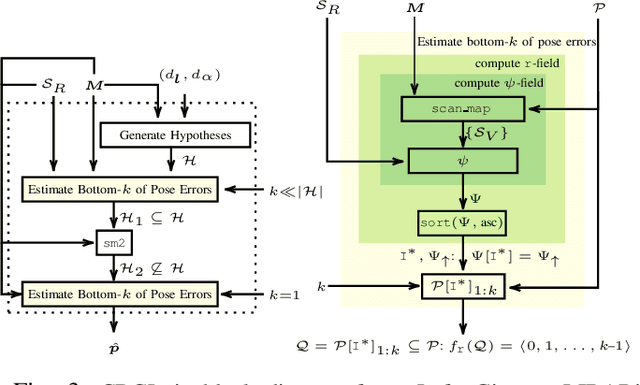

Navigation of a mobile robot is conditioned on the knowledge of its pose. In observer-based localisation configurations its initial pose may not be knowable in advance, leading to the need of its estimation. Solutions to the problem of global localisation are either robust against noise and environment arbitrariness but require motion and time, which may (need to) be economised on, or require minimal estimation time but assume environmental structure, may be sensitive to noise, and demand preprocessing and tuning. This article proposes a method that retains the strengths and avoids the weaknesses of the two approaches. The method leverages properties of the Cumulative Absolute Error per Ray metric with respect to the errors of pose estimates of a 2D LIDAR sensor, and utilises scan--to--map-scan matching for fine(r) pose approximations. A large number of tests, in real and simulated conditions, involving disparate environments and sensor properties, illustrate that the proposed method outperforms state-of-the-art methods of both classes of solutions in terms of pose discovery rate and execution time. The source code is available for download.
Correspondenceless scan-to-map-scan matching of homoriented 2D scans for mobile robot localisation
Jun 26, 2021
The objective of this study is improving the location estimate of a mobile robot capable of motion on a plane and mounted with a conventional 2D LIDAR sensor, given an initial guess for its location on a 2D map of its surroundings. Documented herein is the theoretical reasoning behind solving a matching problem between two homoriented 2D scans, one derived from the robot's physical sensor and one derived by simulating its operation within the map, in a manner that does not require the establishing of correspondences between their constituting rays. Two results are proved and subsequently shown through experiments. The first is that the true position of the sensor can be recovered with arbitrary precision when the physical sensor reports faultless measurements and there is no discrepancy between the environment the robot operates in and its perception of it by the robot. The second is that when either is affected by disturbance, the location estimate is bound in a neighbourhood of the true location whose radius is proportional to the affecting disturbance.
Inducing Generalized Multi-Label Rules with Learning Classifier Systems
Dec 25, 2015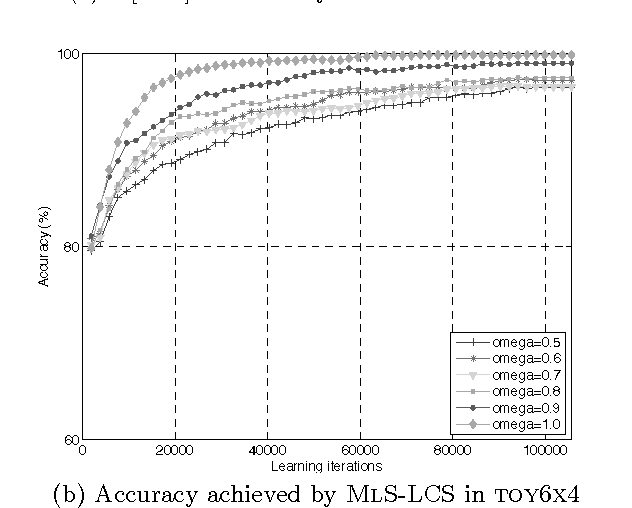
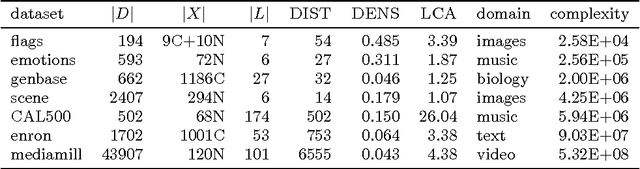
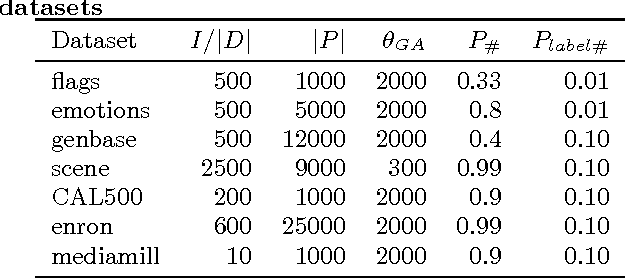
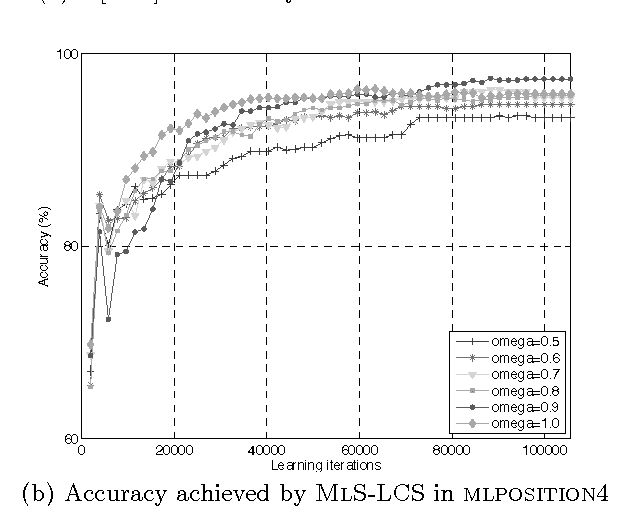
In recent years, multi-label classification has attracted a significant body of research, motivated by real-life applications, such as text classification and medical diagnoses. Although sparsely studied in this context, Learning Classifier Systems are naturally well-suited to multi-label classification problems, whose search space typically involves multiple highly specific niches. This is the motivation behind our current work that introduces a generalized multi-label rule format -- allowing for flexible label-dependency modeling, with no need for explicit knowledge of which correlations to search for -- and uses it as a guide for further adapting the general Michigan-style supervised Learning Classifier System framework. The integration of the aforementioned rule format and framework adaptations results in a novel algorithm for multi-label classification whose behavior is studied through a set of properly defined artificial problems. The proposed algorithm is also thoroughly evaluated on a set of multi-label datasets and found competitive to other state-of-the-art multi-label classification methods.