 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGQ-STN: Optimizing One-Shot Grasp Detection based on Robustness Classifier
Mar 06, 2019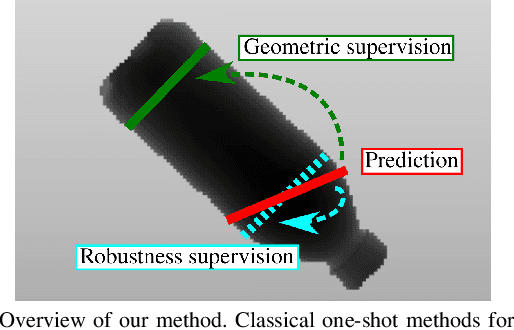
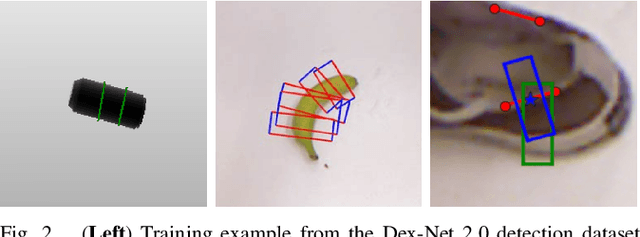


Grasping is a fundamental robotic task needed for the deployment of household robots or furthering warehouse automation. However, few approaches are able to perform grasp detection in real time (frame rate). To this effect, we present Grasp Quality Spatial Transformer Network (GQ-STN), a one-shot grasp detection network. Being based on the Spatial Transformer Network (STN), it produces not only a grasp configuration, but also directly outputs a depth image centered at this configuration. By connecting our architecture to an externally-trained grasp robustness evaluation network, we can train efficiently to satisfy a robustness metric via the backpropagation of the gradient emanating from the evaluation network. This removes the difficulty of training detection networks on sparsely annotated databases, a common issue in grasping. We further propose to use this robustness classifier to compare approaches, being more reliable than the traditional rectangle metric. Our GQ-STN is able to detect robust grasps on the depth images of the Dex-Net 2.0 dataset with 92.4 % accuracy in a single pass of the network. We finally demonstrate in a physical benchmark that our method can propose robust grasps more often than previous sampling-based methods, while being more than 60 times faster.