 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmbodied Flight with a Drone
Jul 06, 2017
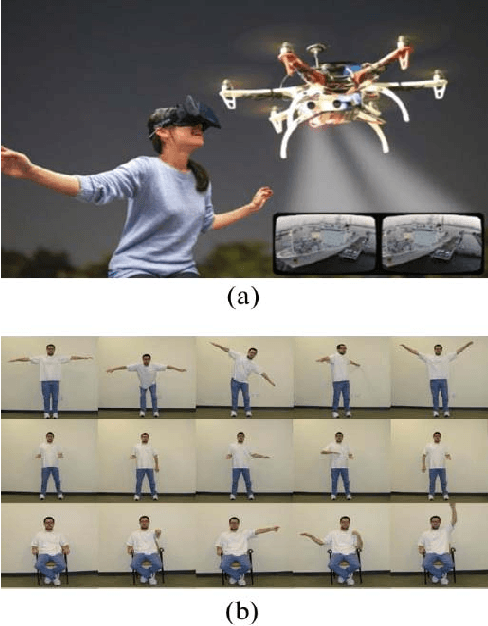
Most human-robot interfaces, such as joysticks and keyboards, require training and constant cognitive effort and provide a limited degree of awareness of the robots state and its environment. Embodied interactions, instead of interfaces, could bridge the gap between humans and robots, allowing humans to naturally perceive and act through a distal robotic body. Establishing an embodied interaction and mapping human movements and a non-anthropomorphic robot is particularly challenging. In this paper, we describe a natural and immersive embodied interaction that allows users to control and experience drone flight with their own bodies. The setup uses a commercial flight simulator that tracks hand movements and provides haptic and visual feedback. The paper discusses how to integrate the simulator with a real drone, how to map body movement with drone motion, and how the resulting embodied interaction provides a more natural and immersive flight experience to unskilled users with respect to a conventional RC remote controller.