 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFORFIS: A forest fire firefighting simulation tool for education and research
May 29, 2023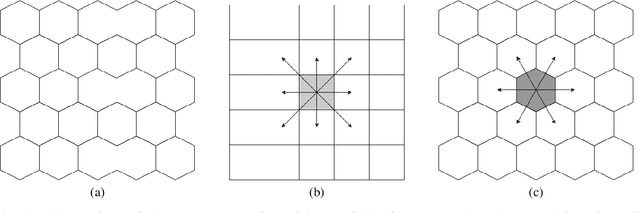
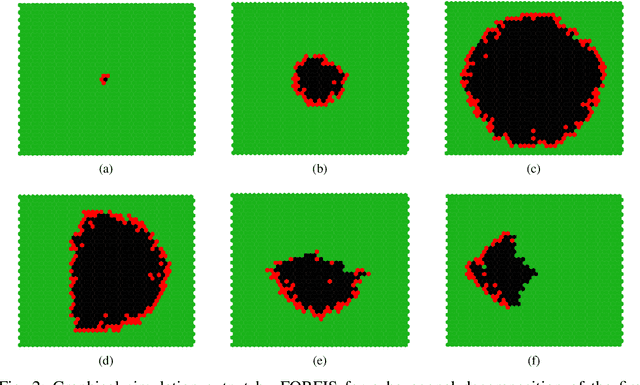
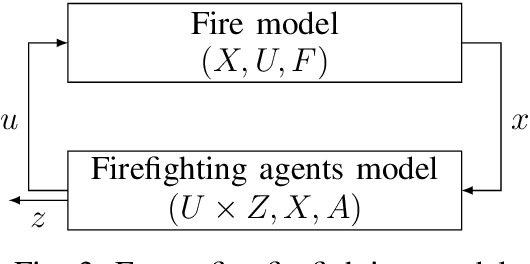
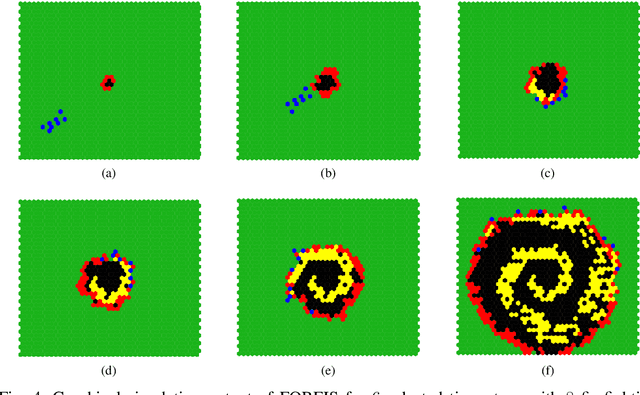
We present a forest fire firefighting simulation tool named FORFIS that is implemented in Python. Unlike other existing software, we focus on a user-friendly software interface with an easy-to-modify software engine. Our tool is published under GNU GPLv3 license and comes with a GUI as well as additional output functionality. The used wildfire model is based on the well-established approach by cellular automata in two variants - a rectangular and a hexagonal cell decomposition of the wildfire area. The model takes wind into account. In addition, our tool allows the user to easily include a customized firefighting strategy for the firefighting agents.
Developing an AI-enabled IIoT platform -- Lessons learned from early use case validation
Jul 10, 2022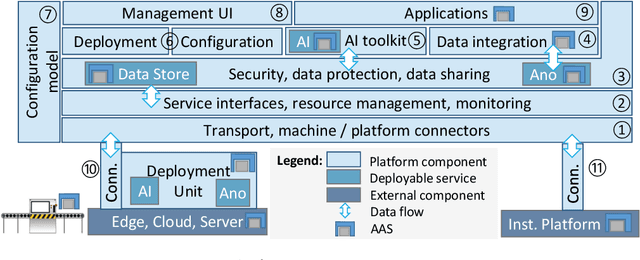
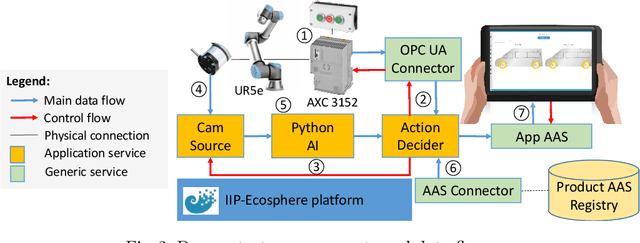
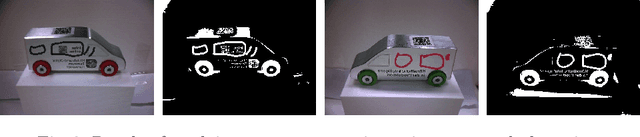

For a broader adoption of AI in industrial production, adequate infrastructure capabilities are crucial. This includes easing the integration of AI with industrial devices, support for distributed deployment, monitoring, and consistent system configuration. Existing IIoT platforms still lack required capabilities to flexibly integrate reusable AI services and relevant standards such as Asset Administration Shells or OPC UA in an open, ecosystem-based manner. This is exactly what our next level Intelligent Industrial Production Ecosphere (IIP-Ecosphere) platform addresses, employing a highly configurable low-code based approach. In this paper, we introduce the design of this platform and discuss an early evaluation in terms of a demonstrator for AI-enabled visual quality inspection. This is complemented by insights and lessons learned during this early evaluation activity.
Vehicle mission guidance by symbolic optimal control
May 27, 2022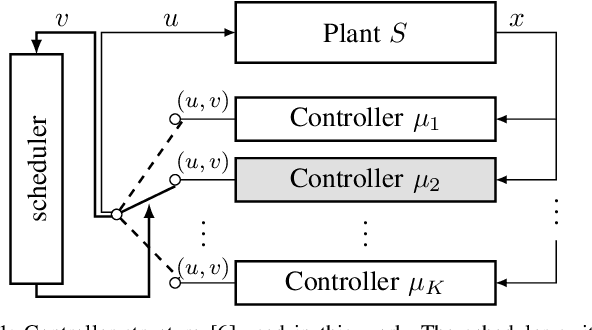
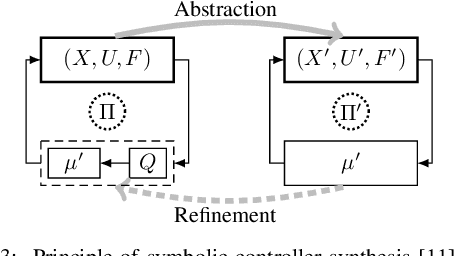
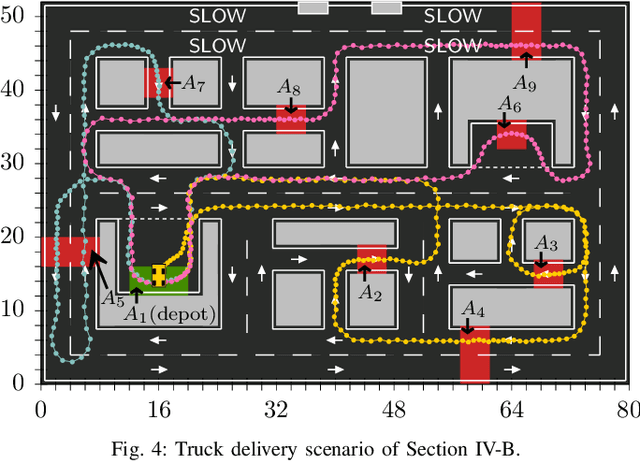
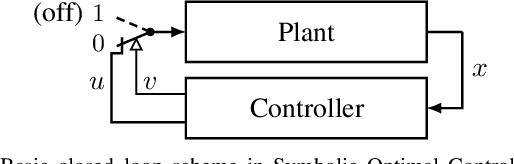
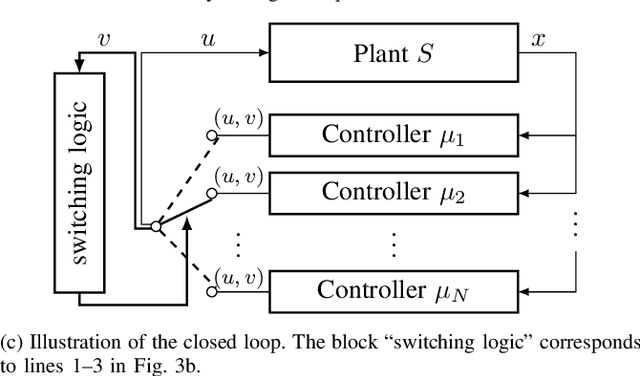
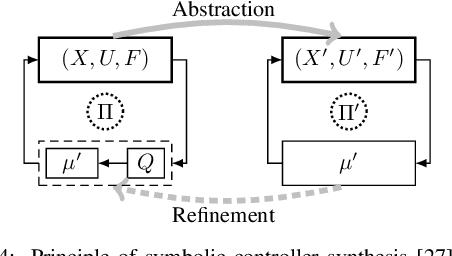
Symbolic optimal control is a powerful method to synthesize algorithmically correct-by-design state-feedback controllers for nonlinear plants. Its solutions are (near-)optimal with respect to a given cost function. In this note, it is demonstrated how symbolic optimal control can be used to calculate controllers for an optimized routing guidance of vehicle systems in continuous state space. In fact, the capacitated vehicle routing problem and a variant of travelling salesman problem are investigated. The latter problem has a relevant application in case of loss of vehicles during mission. A goods delivery scenario and a reconnaissance mission, involving bicycle and aircraft dynamics respectively, are provided as examples.
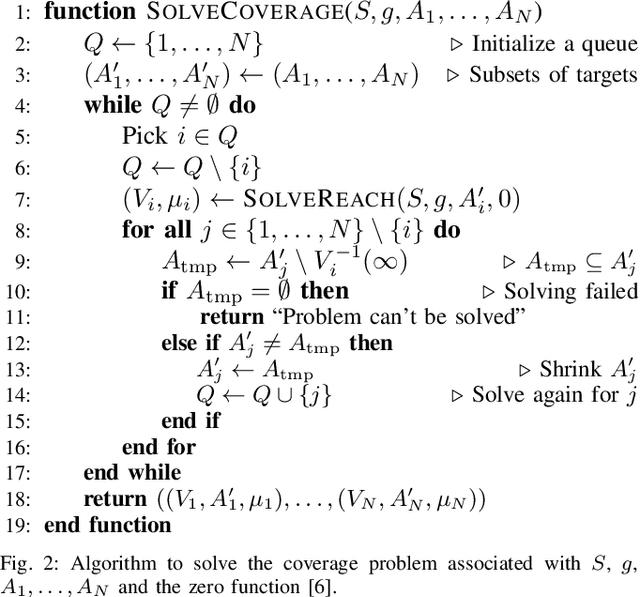
On the Solution of the Travelling Salesman Problem for Nonlinear Salesman Dynamics using Symbolic Optimal Control
Feb 27, 2021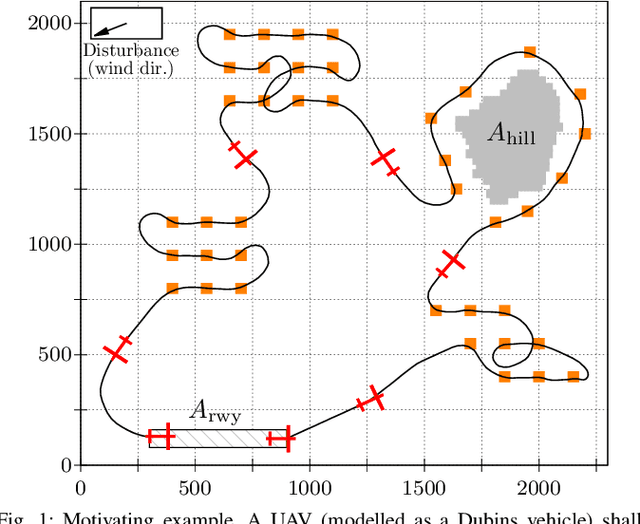
This paper proposes an algorithmic method to heuristically solve the famous Travelling Salesman Problem (TSP) when the salesman's path evolves in continuous state space and discrete time but with otherwise arbitrary (nonlinear) dynamics. The presented method is based on the framework of Symbolic Control. In this way, our method returns a provably correct state-feedback controller for the underlying coverage specification, which is the TSP leaving out the requirement for optimality on the route. In addition, we utilize the Lin-Kernighan-Helsgaun TSP solver to heuristically optimize the cost for the overall taken route. Two examples, an urban parcel delivery task and a UAV reconnaissance mission, greatly illustrate the powerfulness of the proposed heuristic.