 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePyTorch-Hebbian: facilitating local learning in a deep learning framework
Jan 31, 2021



Recently, unsupervised local learning, based on Hebb's idea that change in synaptic efficacy depends on the activity of the pre- and postsynaptic neuron only, has shown potential as an alternative training mechanism to backpropagation. Unfortunately, Hebbian learning remains experimental and rarely makes it way into standard deep learning frameworks. In this work, we investigate the potential of Hebbian learning in the context of standard deep learning workflows. To this end, a framework for thorough and systematic evaluation of local learning rules in existing deep learning pipelines is proposed. Using this framework, the potential of Hebbian learned feature extractors for image classification is illustrated. In particular, the framework is used to expand the Krotov-Hopfield learning rule to standard convolutional neural networks without sacrificing accuracy compared to end-to-end backpropagation. The source code is available at https://github.com/Joxis/pytorch-hebbian.
Populations of Spiking Neurons for Reservoir Computing: Closed Loop Control of a Compliant Quadruped
Apr 14, 2020
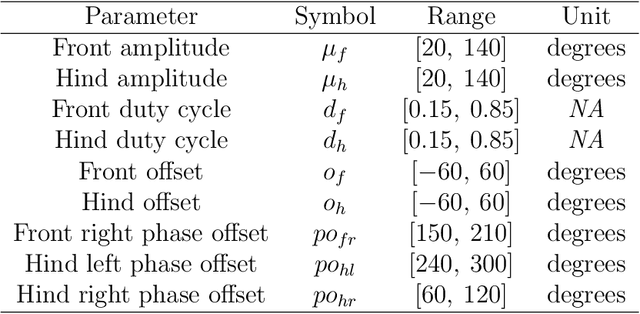

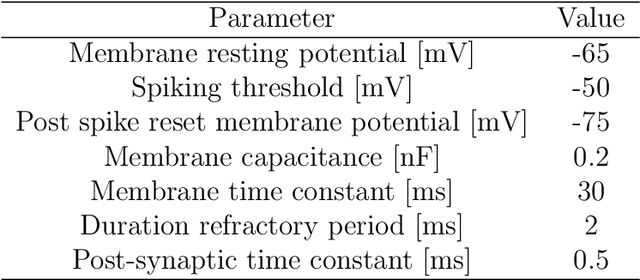
Compliant robots can be more versatile than traditional robots, but their control is more complex. The dynamics of compliant bodies can however be turned into an advantage using the physical reservoir computing frame-work. By feeding sensor signals to the reservoir and extracting motor signals from the reservoir, closed loop robot control is possible. Here, we present a novel framework for implementing central pattern generators with spiking neural networks to obtain closed loop robot control. Using the FORCE learning paradigm, we train a reservoir of spiking neuron populations to act as a central pattern generator. We demonstrate the learning of predefined gait patterns, speed control and gait transition on a simulated model of a compliant quadrupedal robot.