 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Reinforcement Learning with Minimal Supervision
Jan 08, 2025Reinforcement learning (RL) in the real world necessitates the development of procedures that enable agents to explore without causing harm to themselves or others. The most successful solutions to the problem of safe RL leverage offline data to learn a safe-set, enabling safe online exploration. However, this approach to safe-learning is often constrained by the demonstrations that are available for learning. In this paper we investigate the influence of the quantity and quality of data used to train the initial safe learning problem offline on the ability to learn safe-RL policies online. Specifically, we focus on tasks with spatially extended goal states where we have few or no demonstrations available. Classically this problem is addressed either by using hand-designed controllers to generate data or by collecting user-generated demonstrations. However, these methods are often expensive and do not scale to more complex tasks and environments. To address this limitation we propose an unsupervised RL-based offline data collection procedure, to learn complex and scalable policies without the need for hand-designed controllers or user demonstrations. Our research demonstrates the significance of providing sufficient demonstrations for agents to learn optimal safe-RL policies online, and as a result, we propose optimistic forgetting, a novel online safe-RL approach that is practical for scenarios with limited data. Further, our unsupervised data collection approach highlights the need to balance diversity and optimality for safe online exploration.
Quad2Plane: An Intermediate Training Procedure for Online Exploration in Aerial Robotics via Receding Horizon Control
Mar 21, 2022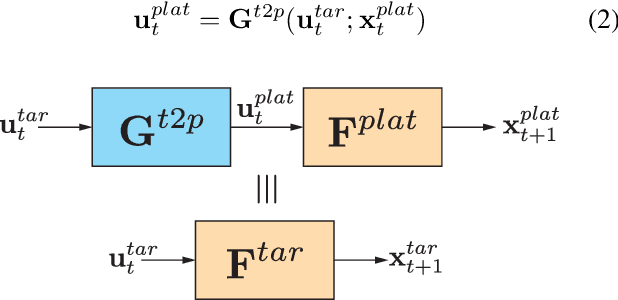
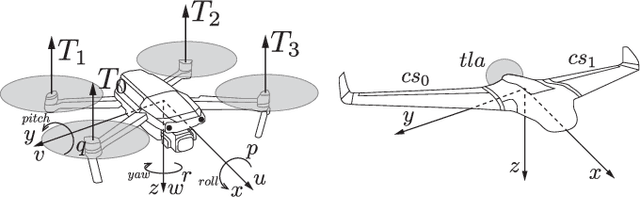
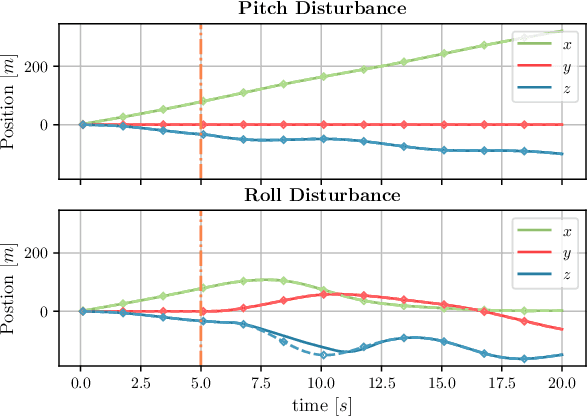
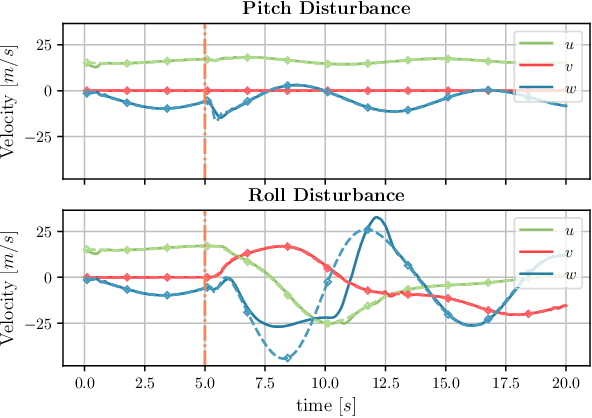
Data driven robotics relies upon accurate real-world representations to learn useful policies. Despite our best-efforts, zero-shot sim-to-real transfer is still an unsolved problem, and we often need to allow our agents to explore online to learn useful policies for a given task. For many applications of field robotics online exploration is prohibitively expensive and dangerous, this is especially true in fixed-wing aerial robotics. To address these challenges we offer an intermediary solution for learning in field robotics. We investigate the use of dissimilar platform vehicle for learning and offer a procedure to mimic the behavior of one vehicle with another. We specifically consider the problem of training fixed-wing aircraft, an expensive and dangerous vehicle type, using a multi-rotor host platform. Using a Model Predictive Control approach, we design a controller capable of mimicking another vehicles behavior in both simulation and the real-world.