 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExperimental verification of an online traction parameter identification method
Mar 20, 2023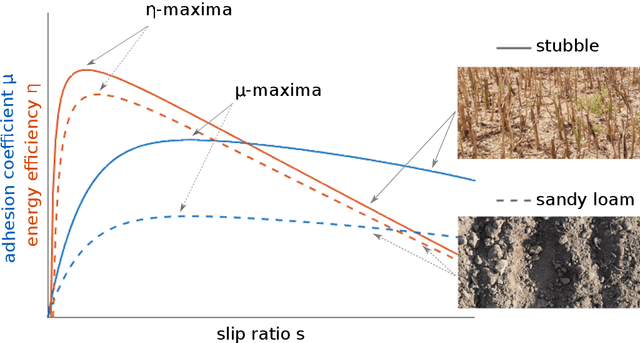

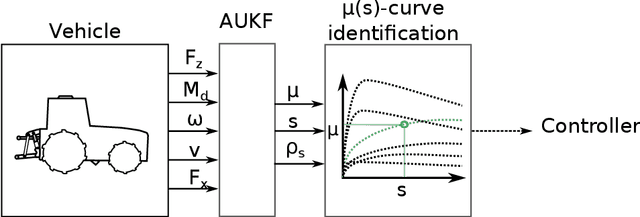
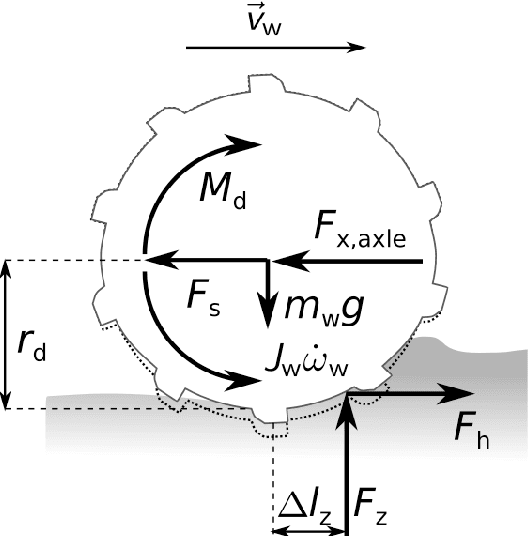
Traction parameters, that characterize the ground-wheel contact dynamics, are the central factor in the energy efficiency of vehicles. To optimize fuel consumption, reduce wear of tires, increase productivity etc., knowledge of current traction parameters is unavoidable. Unfortunately, these parameters are difficult to measure and require expensive force and torque sensors. An alternative way is to use system identification to determine them. In this work, we validate such a method in field experiments with a mobile robot. The method is based on an adaptive Kalman filter. We show how it estimates the traction parameters online, during the motion on the field, and compare them to their values determined via a 6-directional force-torque sensor installed for verification. Data of adhesion slip ratio curves is recorded and compared to curves from literature for additional validation of the method. The results can establish a foundation for a number of optimal traction methods.