 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolarMOT: How Far Can Geometric Relations Take Us in 3D Multi-Object Tracking?
Aug 03, 2022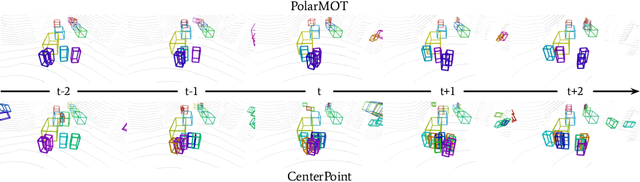
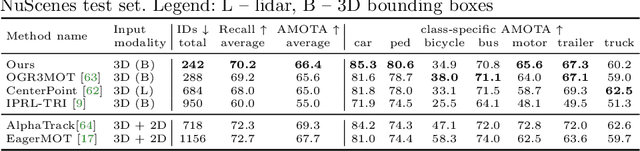
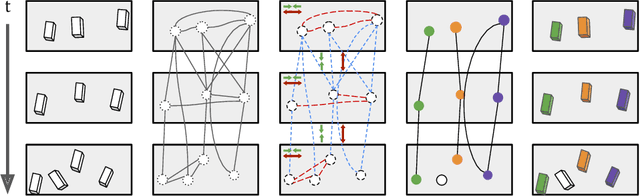

Most (3D) multi-object tracking methods rely on appearance-based cues for data association. By contrast, we investigate how far we can get by only encoding geometric relationships between objects in 3D space as cues for data-driven data association. We encode 3D detections as nodes in a graph, where spatial and temporal pairwise relations among objects are encoded via localized polar coordinates on graph edges. This representation makes our geometric relations invariant to global transformations and smooth trajectory changes, especially under non-holonomic motion. This allows our graph neural network to learn to effectively encode temporal and spatial interactions and fully leverage contextual and motion cues to obtain final scene interpretation by posing data association as edge classification. We establish a new state-of-the-art on nuScenes dataset and, more importantly, show that our method, PolarMOT, generalizes remarkably well across different locations (Boston, Singapore, Karlsruhe) and datasets (nuScenes and KITTI).
EagerMOT: 3D Multi-Object Tracking via Sensor Fusion
Apr 29, 2021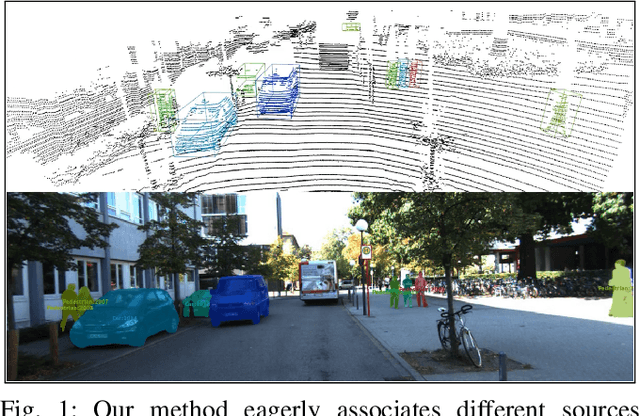
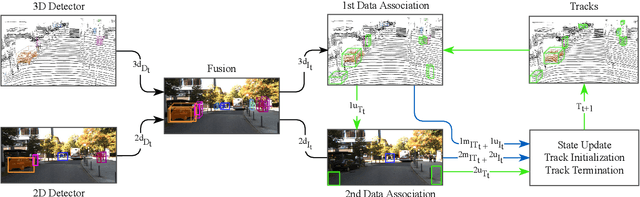
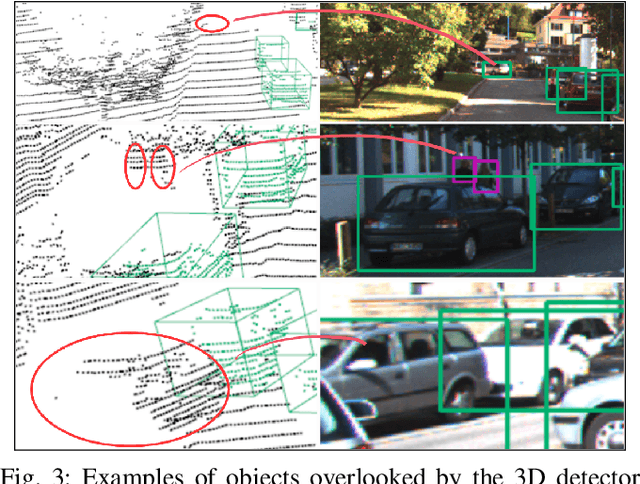
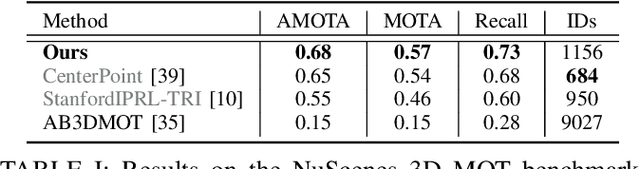
Multi-object tracking (MOT) enables mobile robots to perform well-informed motion planning and navigation by localizing surrounding objects in 3D space and time. Existing methods rely on depth sensors (e.g., LiDAR) to detect and track targets in 3D space, but only up to a limited sensing range due to the sparsity of the signal. On the other hand, cameras provide a dense and rich visual signal that helps to localize even distant objects, but only in the image domain. In this paper, we propose EagerMOT, a simple tracking formulation that eagerly integrates all available object observations from both sensor modalities to obtain a well-informed interpretation of the scene dynamics. Using images, we can identify distant incoming objects, while depth estimates allow for precise trajectory localization as soon as objects are within the depth-sensing range. With EagerMOT, we achieve state-of-the-art results across several MOT tasks on the KITTI and NuScenes datasets. Our code is available at https://github.com/aleksandrkim61/EagerMOT.