Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Reinforcement Learning with Chance-constrained Model Predictive Control
Dec 27, 2021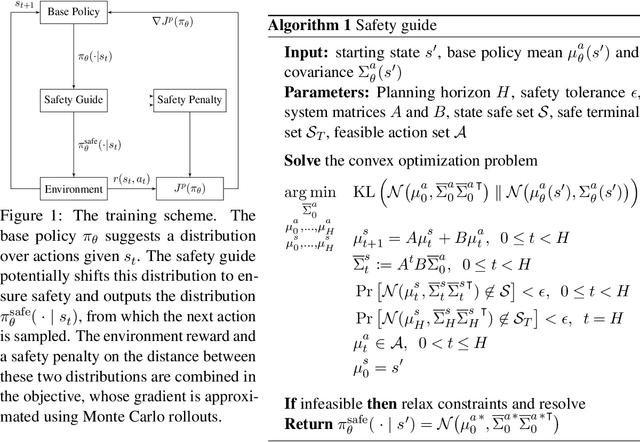
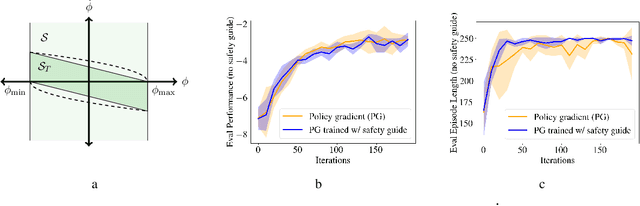
Real-world reinforcement learning (RL) problems often demand that agents behave safely by obeying a set of designed constraints. We address the challenge of safe RL by coupling a safety guide based on model predictive control (MPC) with a modified policy gradient framework in a linear setting with continuous actions. The guide enforces safe operation of the system by embedding safety requirements as chance constraints in the MPC formulation. The policy gradient training step then includes a safety penalty which trains the base policy to behave safely. We show theoretically that this penalty allows for the safety guide to be removed after training and illustrate our method using experiments with a simulator quadrotor.
Via