 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3-D Hand Pose Estimation from Kinect's Point Cloud Using Appearance Matching
Apr 07, 2016

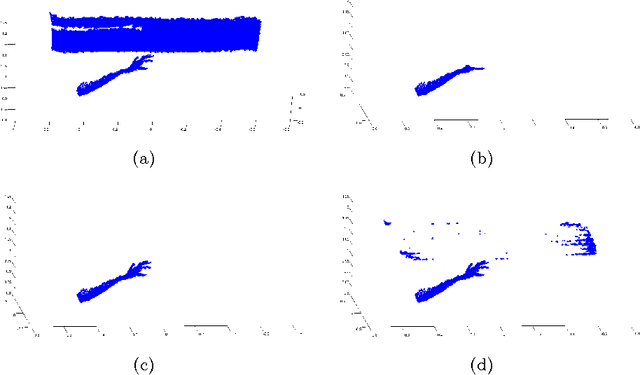
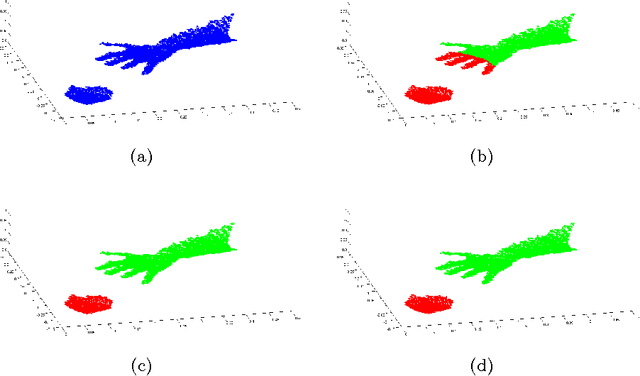
We present a novel appearance-based approach for pose estimation of a human hand using the point clouds provided by the low-cost Microsoft Kinect sensor. Both the free-hand case, in which the hand is isolated from the surrounding environment, and the hand-object case, in which the different types of interactions are classified, have been considered. The hand-object case is clearly the most challenging task having to deal with multiple tracks. The approach proposed here belongs to the class of partial pose estimation where the estimated pose in a frame is used for the initialization of the next one. The pose estimation is obtained by applying a modified version of the Iterative Closest Point (ICP) algorithm to synthetic models to obtain the rigid transformation that aligns each model with respect to the input data. The proposed framework uses a "pure" point cloud as provided by the Kinect sensor without any other information such as RGB values or normal vector components. For this reason, the proposed method can also be applied to data obtained from other types of depth sensor, or RGB-D camera.