 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign, Validation, and Case Studies of 2D-VSR-Sim, an Optimization-friendly Simulator of 2-D Voxel-based Soft Robots
Jan 27, 2020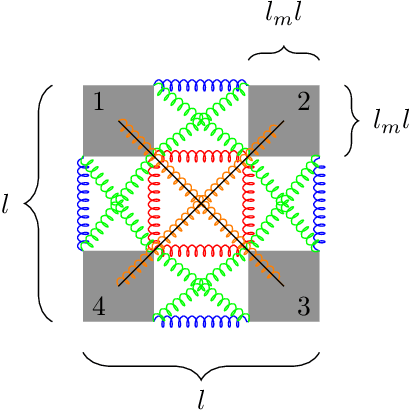
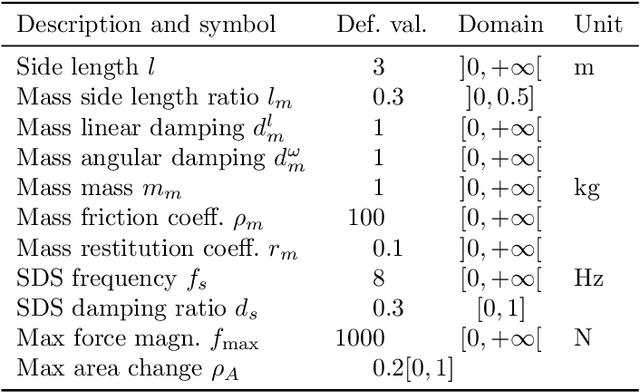
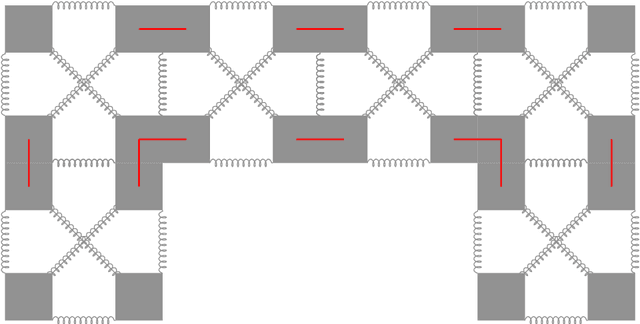
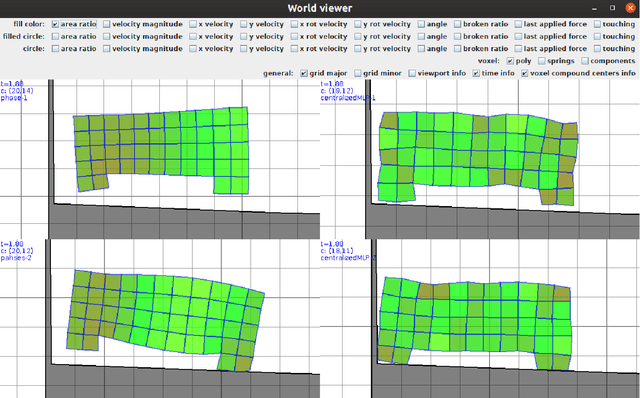
Voxel-based soft robots (VSRs) are aggregations of soft blocks whose design is amenable to optimization. We here present a software, 2D-VSR-Sim, for facilitating research concerning the optimization of VSRs body and brain. The software, written in Java, provides consistent interfaces for all the VSRs aspects suitable for optimization and considers by design the presence of sensing, i.e., the possibility of exploiting the feedback from the environment for controlling the VSR. We experimentally characterize, from a mechanical point of view, the VSRs that can be simulated with 2D-VSR-Sim and we discuss the computational burden of the simulation. Finally, we show how 2D-VSR-Sim can be used to repeat the experiments of significant previous studies and, in perspective, to provide experimental answers to a variety of research questions.
Observing the Population Dynamics in GE by means of the Intrinsic Dimension
Dec 06, 2018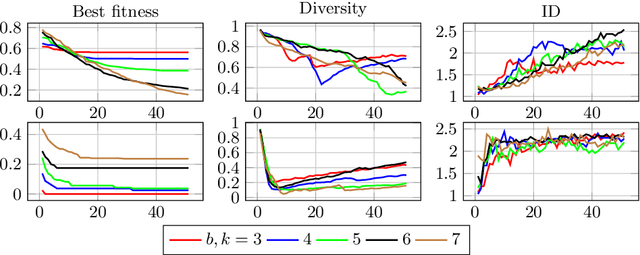
We explore the use of Intrinsic Dimension (ID) for gaining insights in how populations evolve in Evolutionary Algorithms. ID measures the minimum number of dimensions needed to accurately describe a dataset and its estimators are being used more and more in Machine Learning to cope with large datasets. We postulate that ID can provide information about population which is complimentary w.r.t.\ what (a simple measure of) diversity tells. We experimented with the application of ID to populations evolved with a recent variant of Grammatical Evolution. The preliminary results suggest that diversity and ID constitute two different points of view on the population dynamics.