 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollision and Obstacle Avoidance for Industrial Autonomous Vehicles -- Simulation and Experimentation Based on a Cooperative Approach
Jul 09, 2024One of the challenges of Industry 4.0, is to determine and optimize the flow of data, products and materials in manufacturing companies. To realize these challenges, many solutions have been defined such as the utilization of automated guided vehicles (AGVs). However, being guided is a handicap for these vehicles to fully meet the requirements of Industry 4.0 in terms of adaptability and flexibility: the autonomy of vehicles cannot be reduced to predetermined trajectories. Therefore, it is necessary to develop their autonomy. This will be possible by designing new generations of industrial autonomous vehicles (IAVs), in the form of intelligent and cooperative autonomous mobile robots.In the field of road transport, research is very active to make the car autonomous. Many algorithms, solving problematic traffic situations similar to those that can occur in an industrial environment, can be transposed in the industrial field and therefore for IAVs. The technologies standardized in dedicated bodies (e.g., ETSI TC ITS), such as those concerning the exchange of messages between vehicles to increase their awareness or their ability to cooperate, can also be transposed to the industrial context. The deployment of intelligent autonomous vehicle fleets raises several challenges: acceptability by employees, vehicle location, traffic fluidity, vehicle perception of changing environments (dynamic), vehicle-infrastructure cooperation, or vehicles heterogeneity. In this context, developing the autonomy of IAVs requires a relevant working method. The identification of reusable or adaptable algorithms to the various problems raised by the increase in the autonomy of IAVs is not sufficient, it is also necessary to be able to model, to simulate, to test and to experiment with the proposed solutions. Simulation is essential since it allows both to adapt and to validate the algorithms, but also to design and to prepare the experiments.To improve the autonomy of a fleet, we consider the approach relying on a collective intelligence to make the behaviours of vehicles adaptive. In this chapter, we will focus on a class of problems faced by IAVs related to collision and obstacle avoidance. Among these problems, we are particularly interested when two vehicles need to cross an intersection at the same time, known as a deadlock situation. But also, when obstacles are present in the aisles and need to be avoided by the vehicles safely.
Intelligent requirements engineering from natural language and their chaining toward CAD models
Jul 14, 2020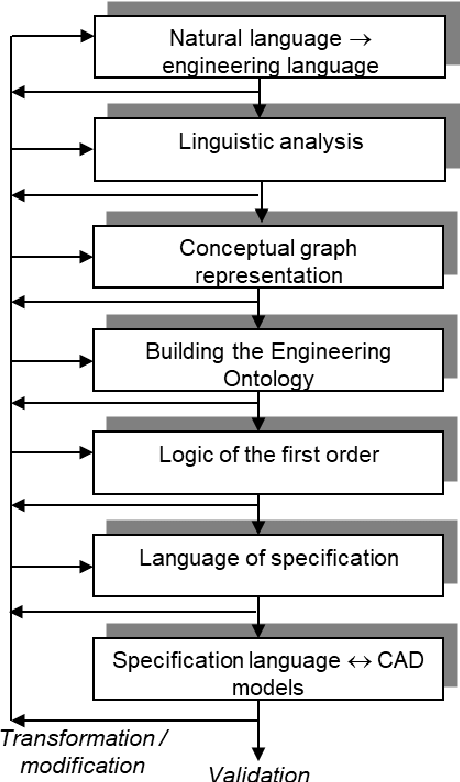


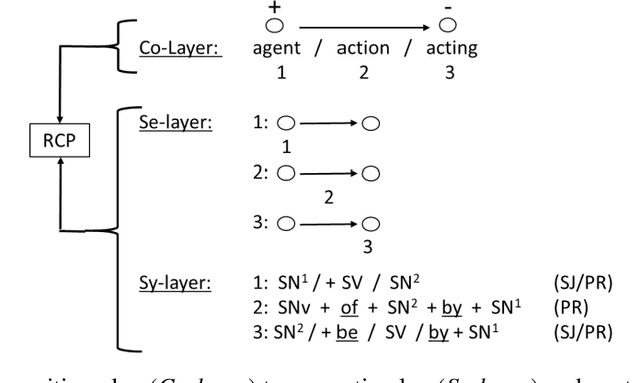
This paper assumes that design language plays an important role in how designers design and on the creativity of designers. Designers use and develop models as an aid to thinking, a focus for discussion and decision-making and a means of evaluating the reliability of the proposals. This paper proposes an intelligent method for requirements engineering from natural language and their chaining toward CAD models. The transition from linguistic analysis to the representation of engineering requirements consists of the translation of the syntactic structure into semantic form represented by conceptual graphs. Based on the isomorphism between conceptual graphs and predicate logic, a formal language of the specification is proposed. The outcome of this language is chained and translated in Computer Aided Three-Dimensional Interactive Application (CATIA) models. The tool (EGEON: Engineering desiGn sEmantics elabOration and applicatioN) is developed to represent the semantic network of engineering requirements. A case study on the design of a car door hinge is presented to illustrates the proposed method.
Sub-pixel matching method for low-resolution thermal stereo images
Nov 30, 2019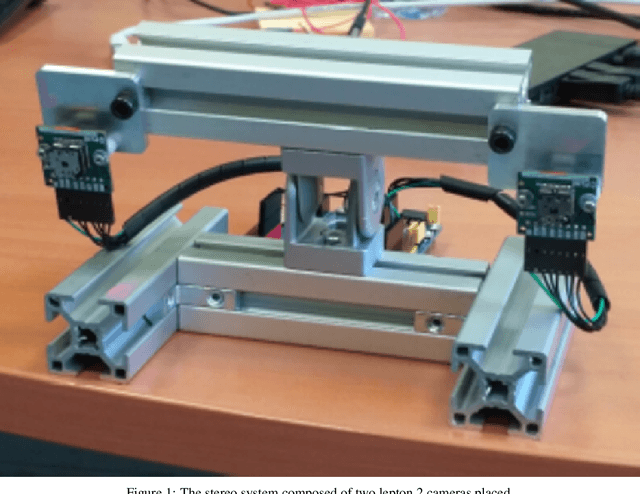
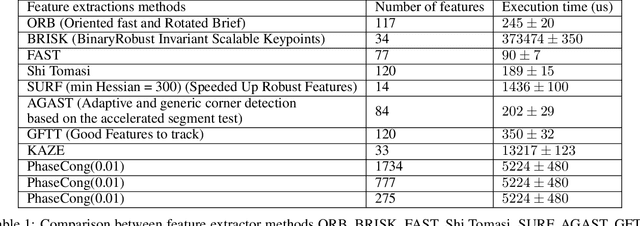
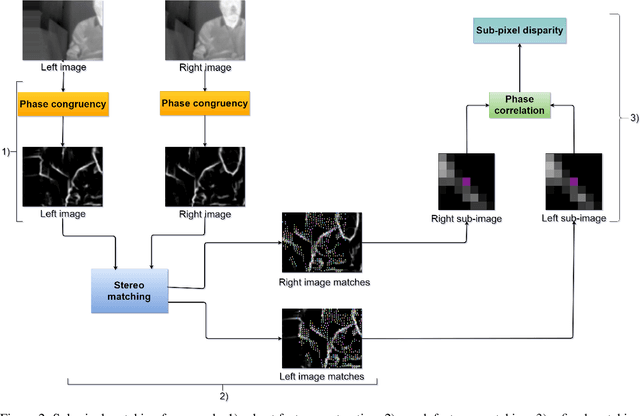
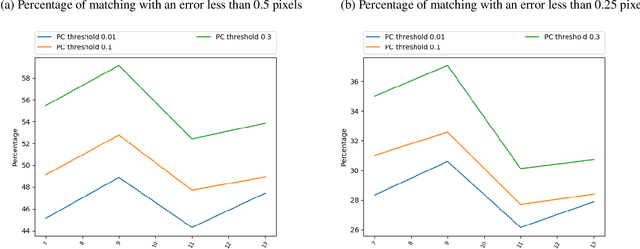
In the context of a localization and tracking application, we developed a stereo vision system based on cheap low-resolution 80x60 pixels thermal cameras. We proposed a threefold sub-pixel stereo matching framework (called ST for Subpixel Thermal): 1) robust features extraction method based on phase congruency, 2) rough matching of these features in pixel precision, and 3) refined matching in sub-pixel accuracy based on local phase coherence. We performed experiments on our very low-resolution thermal images (acquired using a stereo system we manufactured) as for high-resolution images from a benchmark dataset. Even if phase congruency computation time is high, it was able to extract two times more features than state-of-the-art methods such as ORB or SURF. We proposed a modified version of the phase correlation applied in the phase congruency feature space for sub-pixel matching. Using simulated stereo, we investigated how the phase congruency threshold and the sub-image size of sub-pixel matching can influence the accuracy. We then proved that given our stereo setup and the resolution of our images, being wrong of 1 pixel leads to a 500 mm error in the Z position of the point. Finally, we showed that our method could extract four times more matches than a baseline method ORB + OpenCV KNN matching on low-resolution images. Moreover, our matches were more robust. More precisely, when projecting points of a standing person, ST got a standard deviation of 300 mm when ORB + OpenCV KNN gave more than 1000 mm.
A Modelling Approach Based on Fuzzy Agents
Feb 26, 2013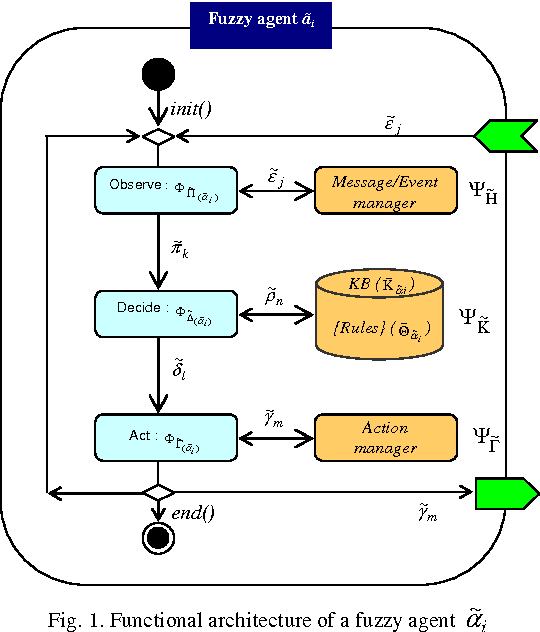
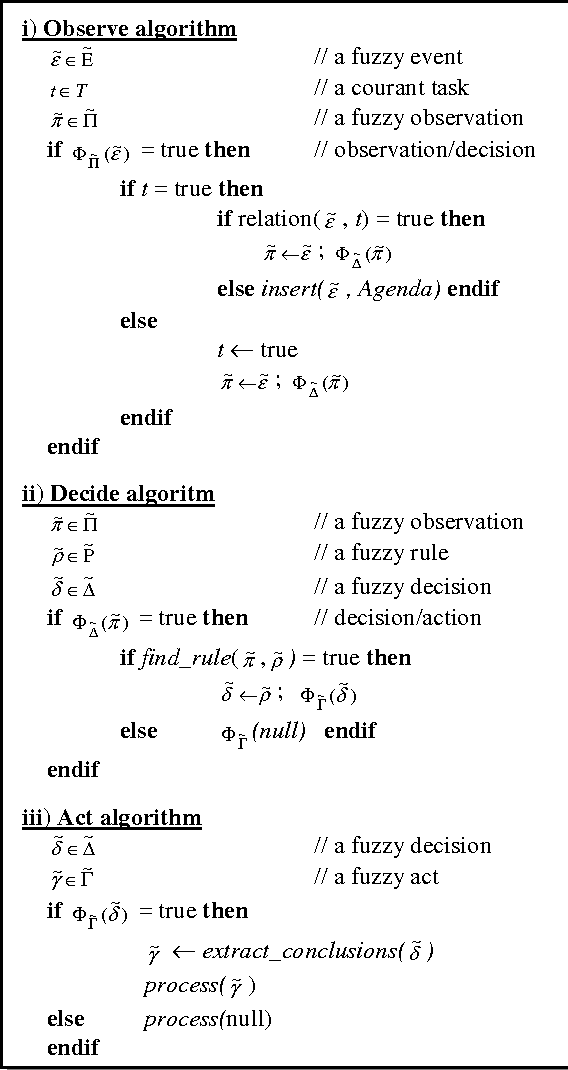
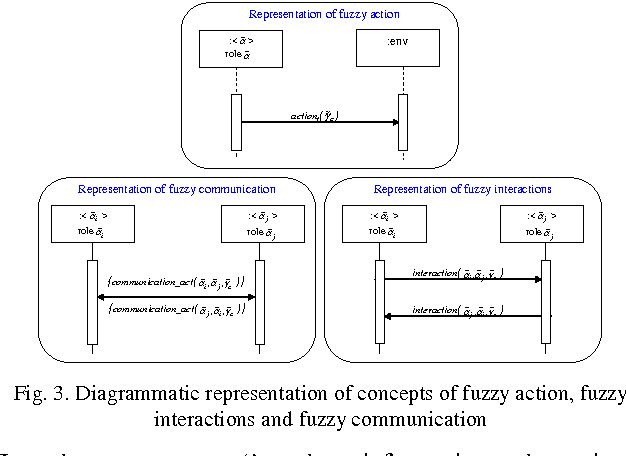
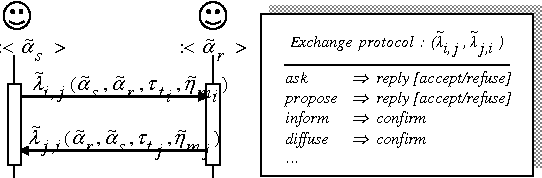
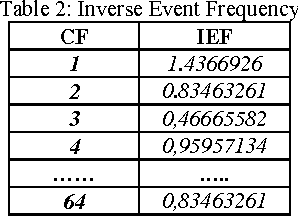
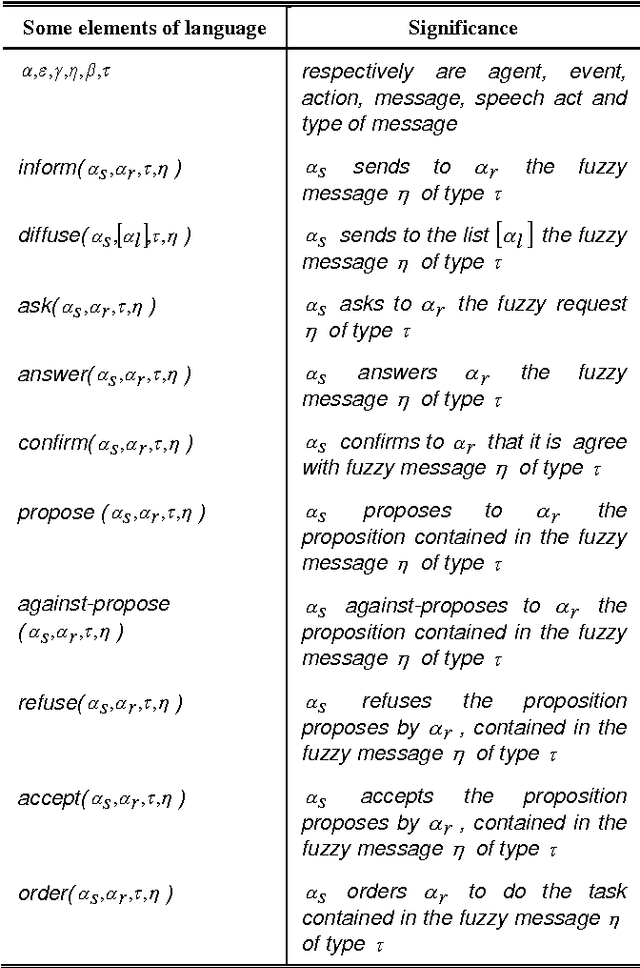
Modelling of complex systems is mainly based on the decomposition of these systems in autonomous elements, and the identification and definitio9n of possible interactions between these elements. For this, the agent-based approach is a modelling solution often proposed. Complexity can also be due to external events or internal to systems, whose main characteristics are uncertainty, imprecision, or whose perception is subjective (i.e. interpreted). Insofar as fuzzy logic provides a solution for modelling uncertainty, the concept of fuzzy agent can model both the complexity and uncertainty. This paper focuses on introducing the concept of fuzzy agent: a classical architecture of agent is redefined according to a fuzzy perspective. A pedagogical illustration of fuzzy agentification of a smart watering system is then proposed.
* 10 pages, 8 figures, 35 references
Dynamic Shared Context Processing in an E-Collaborative Learning Environment
Jan 18, 2012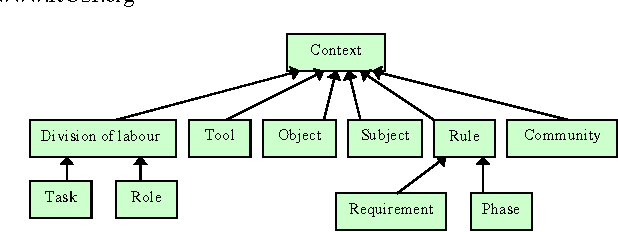

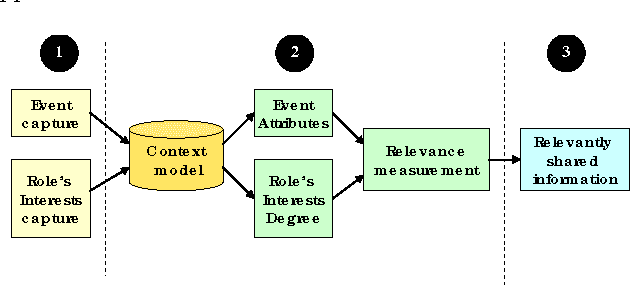
In this paper, we propose a dynamic shared context processing method based on DSC (Dynamic Shared Context) model, applied in an e-collaborative learning environment. Firstly, we present the model. This is a way to measure the relevance between events and roles in collaborative environments. With this method, we can share the most appropriate event information for each role instead of sharing all information to all roles in a collaborative work environment. Then, we apply and verify this method in our project with Google App supported e-learning collaborative environment. During this experiment, we compared DSC method measured relevance of events and roles to manual measured relevance. And we describe the favorable points from this comparison and our finding. Finally, we discuss our future research of a hybrid DSC method to make dynamical information shared more effective in a collaborative work environment.
Modelling and simulation of complex systems: an approach based on multi-level agents
Jan 18, 2012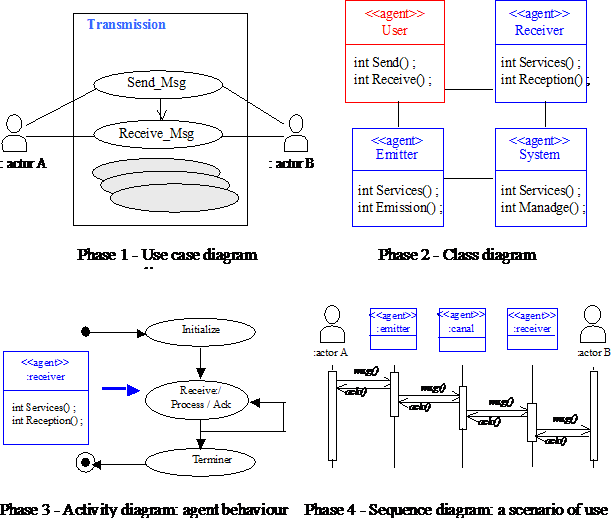
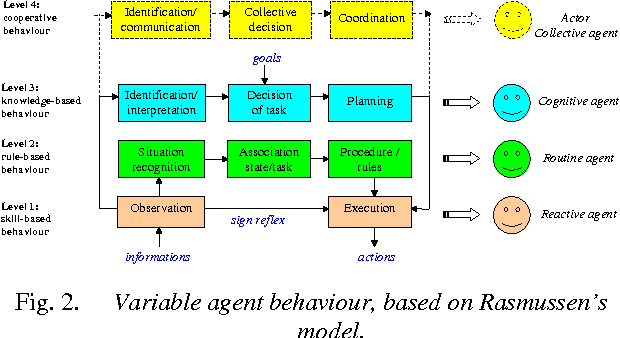
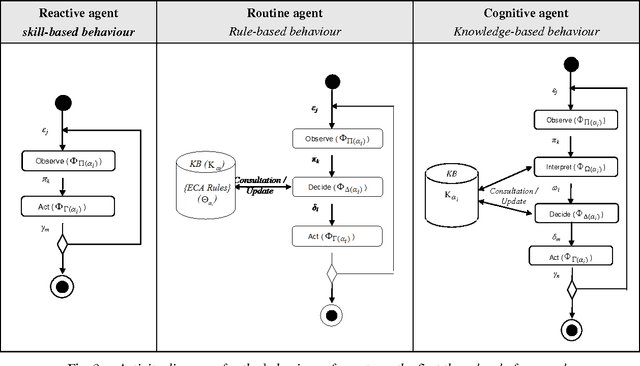
A complex system is made up of many components with many interactions. So the design of systems such as simulation systems, cooperative systems or assistance systems includes a very accurate modelling of interactional and communicational levels. The agent-based approach provides an adapted abstraction level for this problem. After having studied the organizational context and communicative capacities of agentbased systems, to simulate the reorganization of a flexible manufacturing, to regulate an urban transport system, and to simulate an epidemic detection system, our thoughts on the interactional level were inspired by human-machine interface models, especially those in "cognitive engineering". To provide a general framework for agent-based complex systems modelling, we then proposed a scale of four behaviours that agents may adopt in their complex systems (reactive, routine, cognitive, and collective). To complete the description of multi-level agent models, which is the focus of this paper, we illustrate our modelling and discuss our ongoing work on each level.