 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic AI controller that can drive with confidence: steering vehicle with uncertainty knowledge
Apr 24, 2024
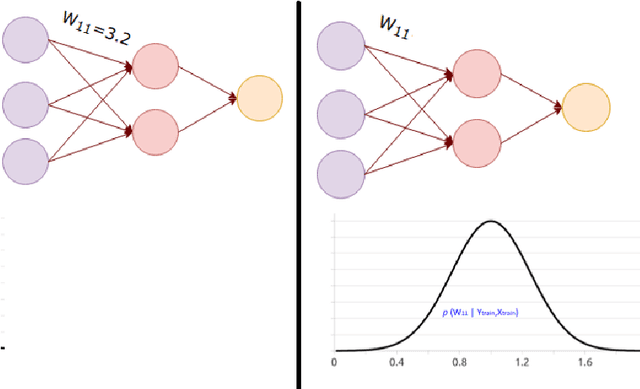
In safety-critical systems that interface with the real world, the role of uncertainty in decision-making is pivotal, particularly in the context of machine learning models. For the secure functioning of Cyber-Physical Systems (CPS), it is imperative to manage such uncertainty adeptly. In this research, we focus on the development of a vehicle's lateral control system using a machine learning framework. Specifically, we employ a Bayesian Neural Network (BNN), a probabilistic learning model, to address uncertainty quantification. This capability allows us to gauge the level of confidence or uncertainty in the model's predictions. The BNN based controller is trained using simulated data gathered from the vehicle traversing a single track and subsequently tested on various other tracks. We want to share two significant results: firstly, the trained model demonstrates the ability to adapt and effectively control the vehicle on multiple similar tracks. Secondly, the quantification of prediction confidence integrated into the controller serves as an early-warning system, signaling when the algorithm lacks confidence in its predictions and is therefore susceptible to failure. By establishing a confidence threshold, we can trigger manual intervention, ensuring that control is relinquished from the algorithm when it operates outside of safe parameters.
Vehicle lateral control using Machine Learning for automated vehicle guidance
Mar 14, 2023Uncertainty in decision-making is crucial in the machine learning model used for a safety-critical system that operates in the real world. Therefore, it is important to handle uncertainty in a graceful manner for the safe operation of the CPS. In this work, we design a vehicle's lateral controller using a machine-learning model. To this end, we train a random forest model that is an ensemble model and a deep neural network model. Due to the ensemble in the random forest model, we can predict the confidence/uncertainty in the prediction. We train our controller on data generated from running the car on one track in the simulator and tested it on other tracks. Due to prediction in confidence, we could decide when the controller is less confident in prediction and takes control if needed. We have two results to share: first, even on a very small number of labeled data, a very good generalization capability of the random forest-based regressor in comparison with a deep neural network and accordingly random forest controller can drive on another similar track, where the deep neural network-based model fails to drive, and second confidence in predictions in random forest controller makes it possible to let us know when the controller is not confident in prediction and likely to fail. By creating a threshold, it was possible to take control when the controller is not safe and that is missing in a deep neural network-based controller.