 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat is Left After Distillation? How Knowledge Transfer Impacts Fairness and Bias
Oct 10, 2024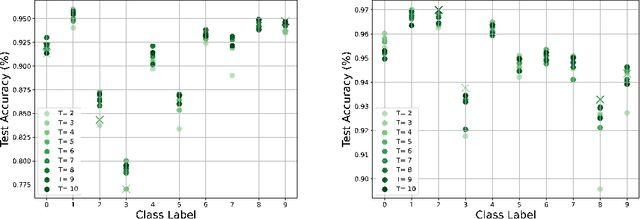
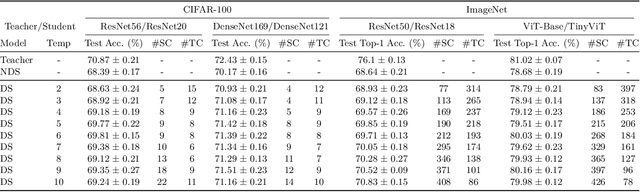
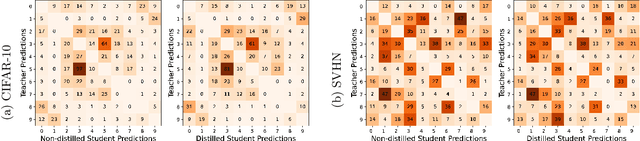
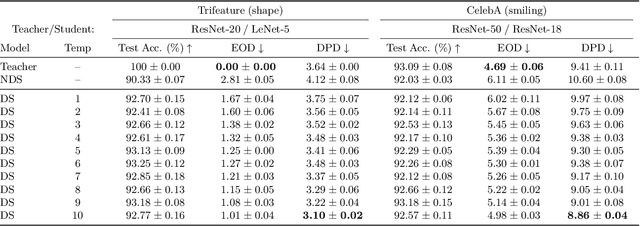
Knowledge Distillation is a commonly used Deep Neural Network compression method, which often maintains overall generalization performance. However, we show that even for balanced image classification datasets, such as CIFAR-100, Tiny ImageNet and ImageNet, as many as 41% of the classes are statistically significantly affected by distillation when comparing class-wise accuracy (i.e. class bias) between a teacher/distilled student or distilled student/non-distilled student model. Changes in class bias are not necessarily an undesirable outcome when considered outside of the context of a model's usage. Using two common fairness metrics, Demographic Parity Difference (DPD) and Equalized Odds Difference (EOD) on models trained with the CelebA, Trifeature, and HateXplain datasets, our results suggest that increasing the distillation temperature improves the distilled student model's fairness -- for DPD, the distilled student even surpasses the fairness of the teacher model at high temperatures. This study highlights the uneven effects of Knowledge Distillation on certain classes and its potentially significant role in fairness, emphasizing that caution is warranted when using distilled models for sensitive application domains.
An intelligent modular real-time vision-based system for environment perception
Mar 29, 2023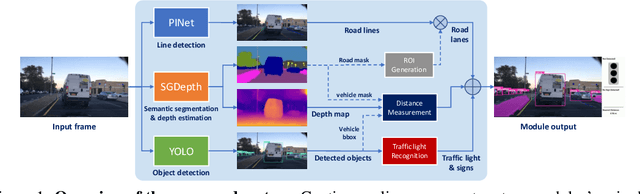

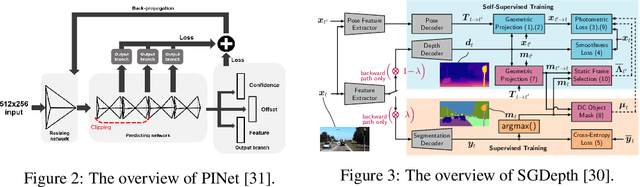
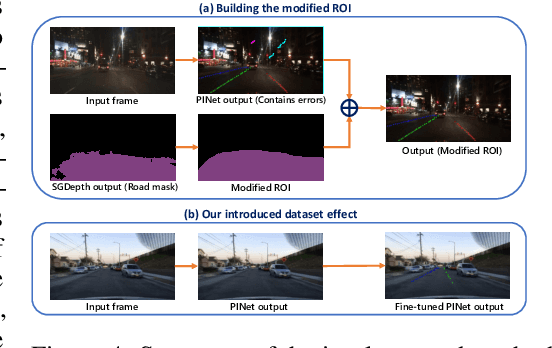
A significant portion of driving hazards is caused by human error and disregard for local driving regulations; Consequently, an intelligent assistance system can be beneficial. This paper proposes a novel vision-based modular package to ensure drivers' safety by perceiving the environment. Each module is designed based on accuracy and inference time to deliver real-time performance. As a result, the proposed system can be implemented on a wide range of vehicles with minimum hardware requirements. Our modular package comprises four main sections: lane detection, object detection, segmentation, and monocular depth estimation. Each section is accompanied by novel techniques to improve the accuracy of others along with the entire system. Furthermore, a GUI is developed to display perceived information to the driver. In addition to using public datasets, like BDD100K, we have also collected and annotated a local dataset that we utilize to fine-tune and evaluate our system. We show that the accuracy of our system is above 80% in all the sections. Our code and data are available at https://github.com/Pandas-Team/Autonomous-Vehicle-Environment-Perception