 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNITEC: Versatile Hand-Annotated Eye Contact Dataset for Ego-Vision Interaction
Nov 08, 2023



Eye contact is a crucial non-verbal interaction modality and plays an important role in our everyday social life. While humans are very sensitive to eye contact, the capabilities of machines to capture a person's gaze are still mediocre. We tackle this challenge and present NITEC, a hand-annotated eye contact dataset for ego-vision interaction. NITEC exceeds existing datasets for ego-vision eye contact in size and variety of demographics, social contexts, and lighting conditions, making it a valuable resource for advancing ego-vision-based eye contact research. Our extensive evaluations on NITEC demonstrate strong cross-dataset performance, emphasizing its effectiveness and adaptability in various scenarios, that allows seamless utilization to the fields of computer vision, human-computer interaction, and social robotics. We make our NITEC dataset publicly available to foster reproducibility and further exploration in the field of ego-vision interaction. https://github.com/thohemp/nitec
Towards Robust and Unconstrained Full Range of Rotation Head Pose Estimation
Sep 14, 2023Estimating the head pose of a person is a crucial problem for numerous applications that is yet mainly addressed as a subtask of frontal pose prediction. We present a novel method for unconstrained end-to-end head pose estimation to tackle the challenging task of full range of orientation head pose prediction. We address the issue of ambiguous rotation labels by introducing the rotation matrix formalism for our ground truth data and propose a continuous 6D rotation matrix representation for efficient and robust direct regression. This allows to efficiently learn full rotation appearance and to overcome the limitations of the current state-of-the-art. Together with new accumulated training data that provides full head pose rotation data and a geodesic loss approach for stable learning, we design an advanced model that is able to predict an extended range of head orientations. An extensive evaluation on public datasets demonstrates that our method significantly outperforms other state-of-the-art methods in an efficient and robust manner, while its advanced prediction range allows the expansion of the application area. We open-source our training and testing code along with our trained models: https://github.com/thohemp/6DRepNet360.
L2CS-Net: Fine-Grained Gaze Estimation in Unconstrained Environments
Mar 07, 2022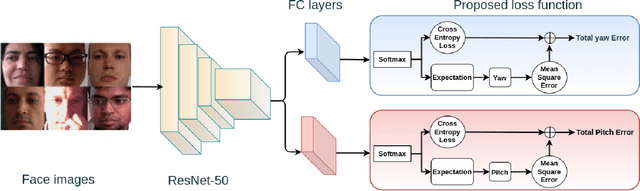
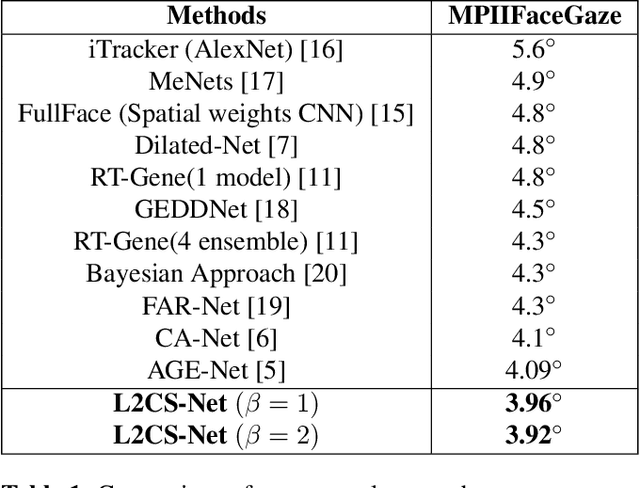
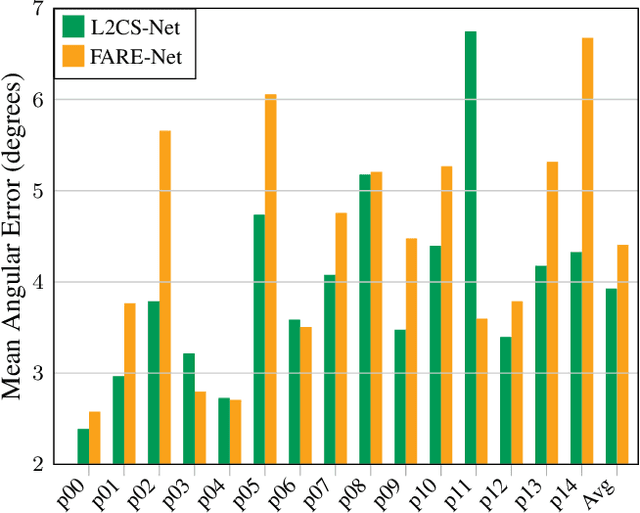
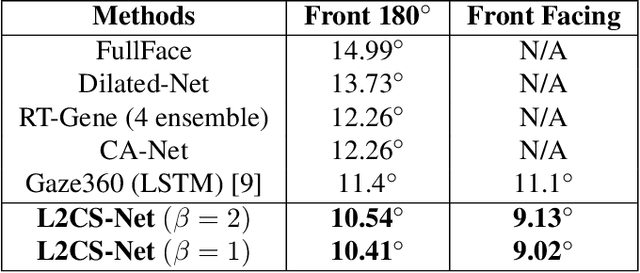
Human gaze is a crucial cue used in various applications such as human-robot interaction and virtual reality. Recently, convolution neural network (CNN) approaches have made notable progress in predicting gaze direction. However, estimating gaze in-the-wild is still a challenging problem due to the uniqueness of eye appearance, lightning conditions, and the diversity of head pose and gaze directions. In this paper, we propose a robust CNN-based model for predicting gaze in unconstrained settings. We propose to regress each gaze angle separately to improve the per-angel prediction accuracy, which will enhance the overall gaze performance. In addition, we use two identical losses, one for each angle, to improve network learning and increase its generalization. We evaluate our model with two popular datasets collected with unconstrained settings. Our proposed model achieves state-of-the-art accuracy of 3.92{\deg} and 10.41{\deg} on MPIIGaze and Gaze360 datasets, respectively. We make our code open source at https://github.com/Ahmednull/L2CS-Net.
6D Rotation Representation For Unconstrained Head Pose Estimation
Feb 25, 2022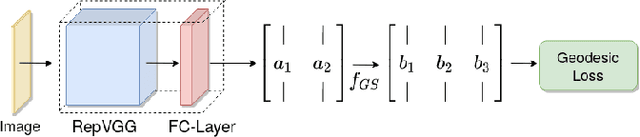
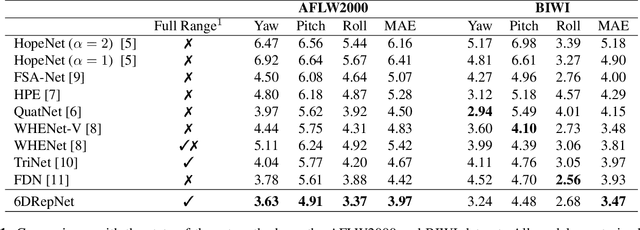

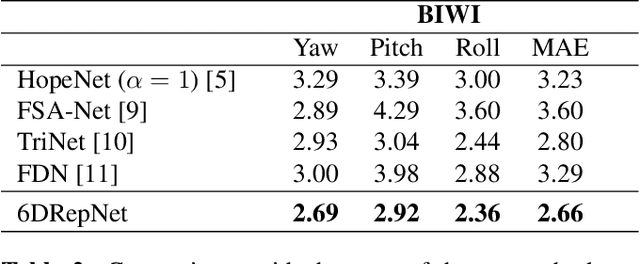
In this paper, we present a method for unconstrained end-to-end head pose estimation. We address the problem of ambiguous rotation labels by introducing the rotation matrix formalism for our ground truth data and propose a continuous 6D rotation matrix representation for efficient and robust direct regression. This way, our method can learn the full rotation appearance which is contrary to previous approaches that restrict the pose prediction to a narrow-angle for satisfactory results. In addition, we propose a geodesic distance-based loss to penalize our network with respect to the SO(3) manifold geometry. Experiments on the public AFLW2000 and BIWI datasets demonstrate that our proposed method significantly outperforms other state-of-the-art methods by up to 20\%. We open-source our training and testing code along with our pre-trained models: https://github.com/thohemp/6DRepNet.