 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety experiments for small robots investigating the potential of soft materials in mitigating the harm to the head due to impacts
Apr 21, 2019
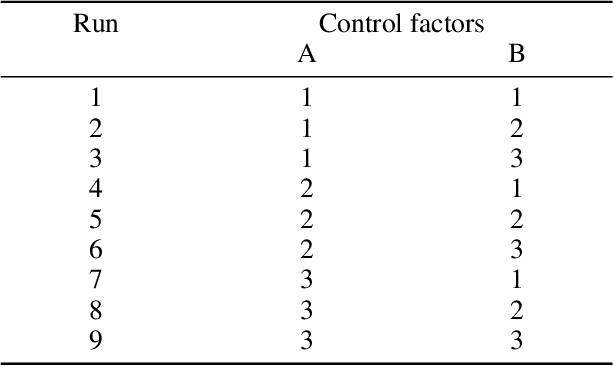
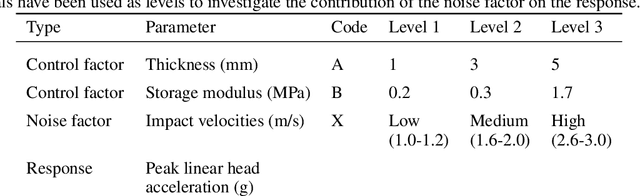
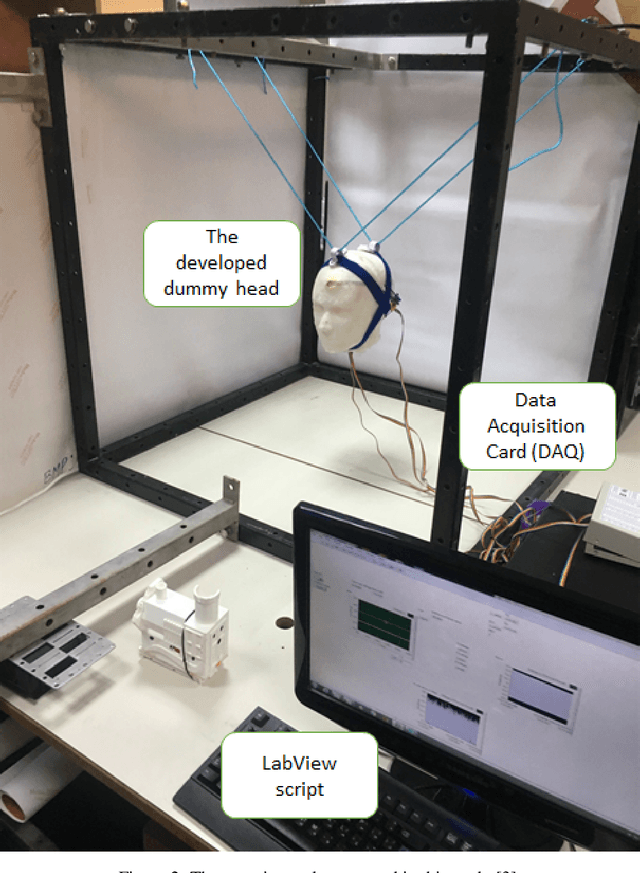
There is a growing interest in social robots to be considered in the therapy of children with autism due to their effectiveness in improving the outcomes. However, children on the spectrum exhibit challenging behaviors that need to be considered when designing robots for them. A child could involuntarily throw a small social robot during meltdown and that could hit another person's head and cause harm (e.g. concussion). In this paper, the application of soft materials is investigated for its potential in attenuating head's linear acceleration upon impact. The thickness and storage modulus of three different soft materials were considered as the control factors while the noise factor was the impact velocity. The design of experiments was based on Taguchi method. A total of 27 experiments were conducted on a developed dummy head setup that reports the linear acceleration of the head. ANOVA tests were performed to analyze the data. The findings showed that the control factors are not statistically significant in attenuating the response. The optimal values of the control factors were identified using the signal-to-noise (S/N) ratio optimization technique. Confirmation runs at the optimal parameters (i.e. thickness of 3 mm and 5 mm) showed a better response as compared to other conditions. Designers of social robots should consider the application of soft materials to their designs as it help in reducing the potential harm to the head.