 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Gamified Interaction with a Humanoid Robot to explain Therapeutic Procedures in Pediatric Asthma
Jun 12, 2023

In chronic diseases, obtaining a correct diagnosis and providing the most appropriate treatments often is not enough to guarantee an improvement of the clinical condition of a patient. Poor adherence to medical prescriptions constitutes one of the main causes preventing achievement of therapeutic goals. This is generally true especially for certain diseases and specific target patients, such as children. An engaging and entertaining technology can be exploited in support of clinical practices to achieve better health outcomes. Our assumption is that a gamified session with a humanoid robot, compared to the usual methodologies for therapeutic education, can be more incisive in learning the correct inhalation procedure in children affected by asthma. In this perspective, we describe an interactive module implemented on the Pepper robotic platform and the setting of a study that was planned in 2020 to be held at the Pneumoallergology Pediatric clinic of CNR in Palermo. The study was canceled due to the COVID-19 pandemic. Our long-term goal is to assess, by means of a qualitative-quantitative survey plan, the impact of such an educational action, evaluating possible improvement in the adherence to the treatment.
Social Practices for Social Driven Conversations in Serious Games
Jun 10, 2022This paper describes the model of social practice as a theoretical framework to manage conversation with the specific goal of training physicians in communicative skills. To this aim, the domain reasoner that manages the conversation in the Communicate! \cite{jeuring} serious game is taken as a basis. Because the choice of a specific Social Practice to follow in a situation is non-trivial we use a probabilistic model for the selection of social practices as a step toward the implementation of an agent architecture compliant with the social practice model.
A Storytelling Robot managing Persuasive and Ethical Stances via ACT-R: an Exploratory Study
Jul 27, 2021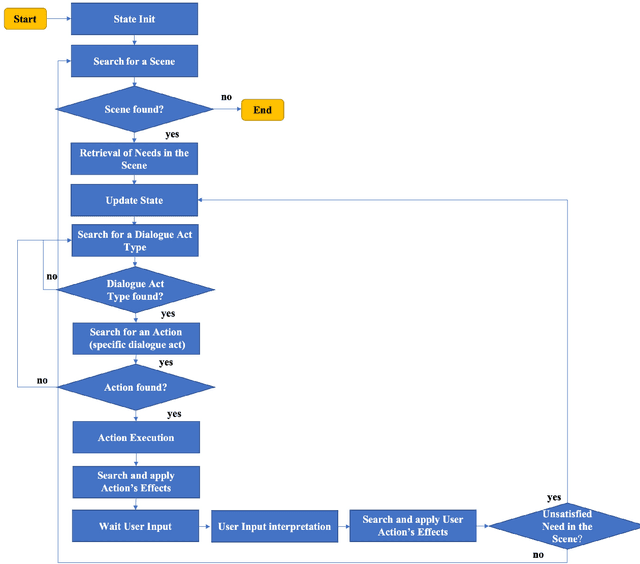
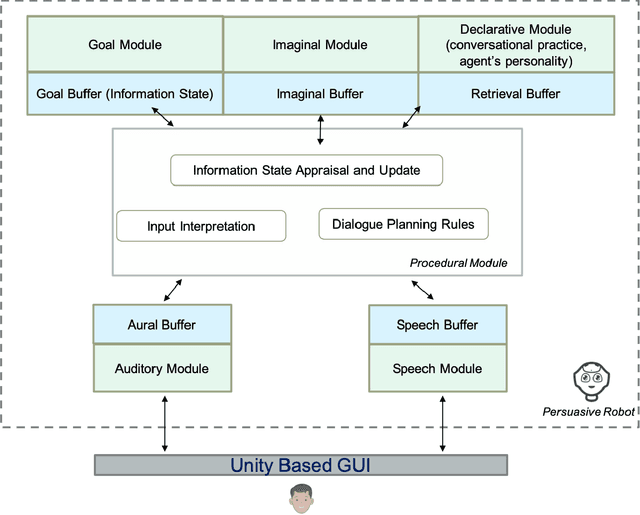
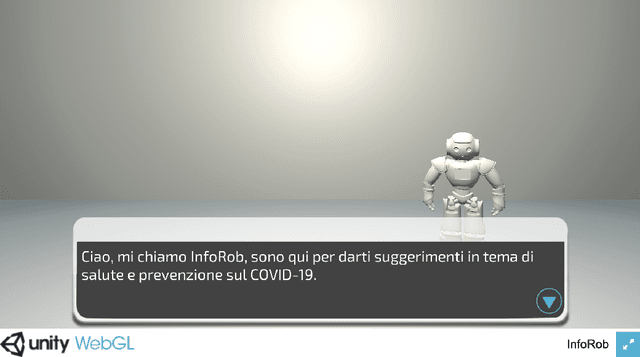
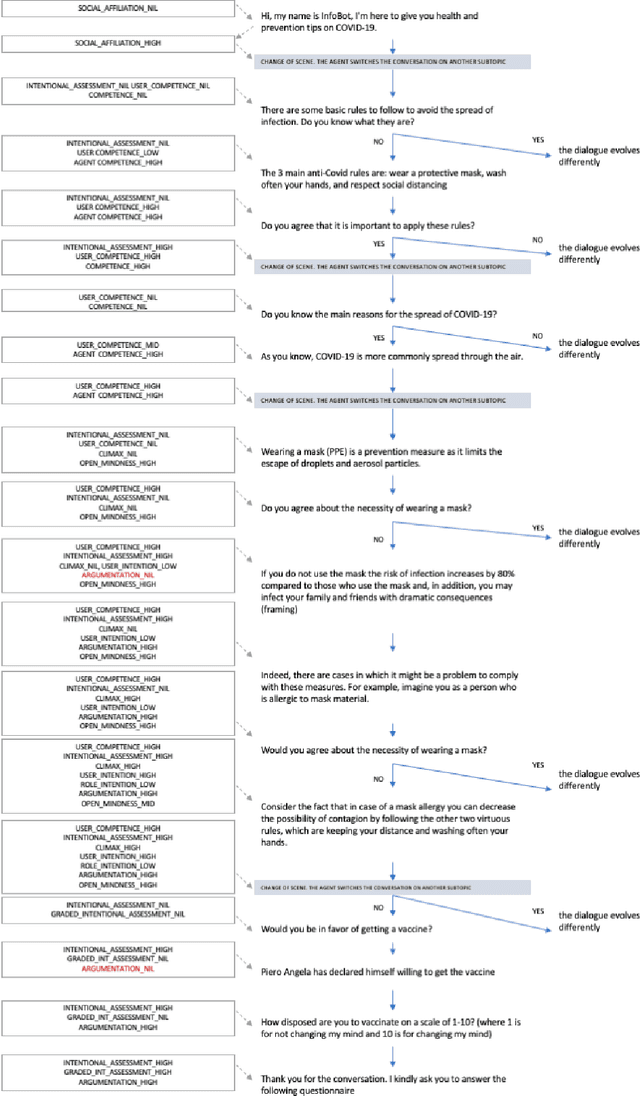
We present a storytelling robot, controlled via the ACT-R cognitive architecture, able to adopt different persuasive techniques and ethical stances while conversing about some topics concerning COVID-19. The main contribution of the paper consists in the proposal of a needs-driven model that guides and evaluates, during the dialogue, the use (if any) of persuasive techniques available in the agent procedural memory. The portfolio of persuasive techniques tested in such a model ranges from the use of storytelling, to framing techniques and rhetorical-based arguments. To the best of our knowledge, this represents the first attempt of building a persuasive agent able to integrate a mix of explicitly grounded cognitive assumptions about dialogue management, storytelling and persuasive techniques as well as ethical attitudes. The paper presents the results of an exploratory evaluation of the system on 63 participants
* 20 pages, 7 figures
Creative Robot Dance with Variational Encoder
Jul 05, 2017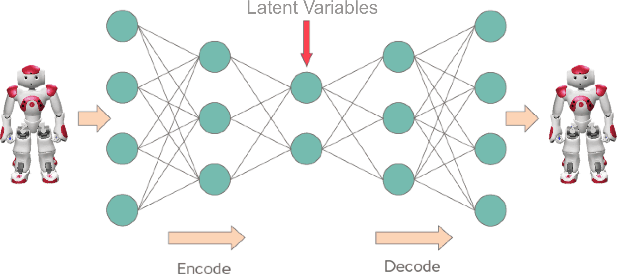
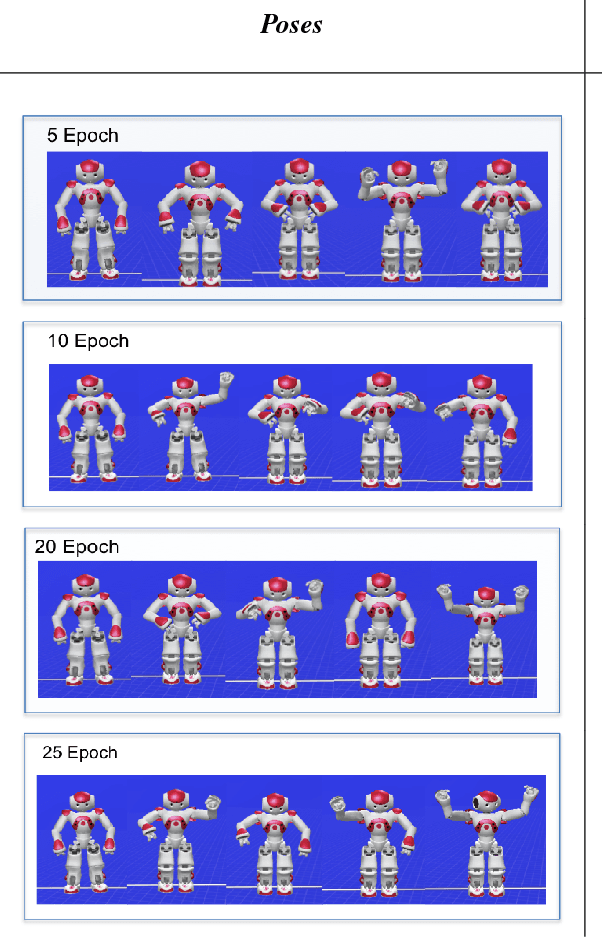
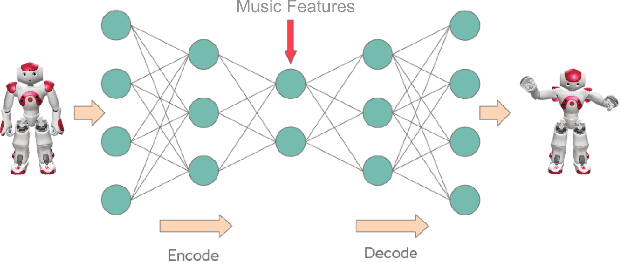
What we appreciate in dance is the ability of people to sponta- neously improvise new movements and choreographies, sur- rendering to the music rhythm, being inspired by the cur- rent perceptions and sensations and by previous experiences, deeply stored in their memory. Like other human abilities, this, of course, is challenging to reproduce in an artificial entity such as a robot. Recent generations of anthropomor- phic robots, the so-called humanoids, however, exhibit more and more sophisticated skills and raised the interest in robotic communities to design and experiment systems devoted to automatic dance generation. In this work, we highlight the importance to model a computational creativity behavior in dancing robots to avoid a mere execution of preprogrammed dances. In particular, we exploit a deep learning approach that allows a robot to generate in real time new dancing move- ments according to to the listened music.
Artwork creation by a cognitive architecture integrating computational creativity and dual process approaches
Jan 04, 2016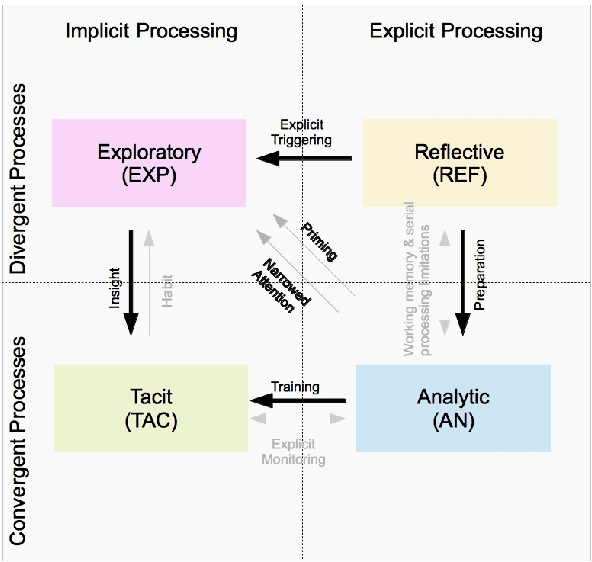
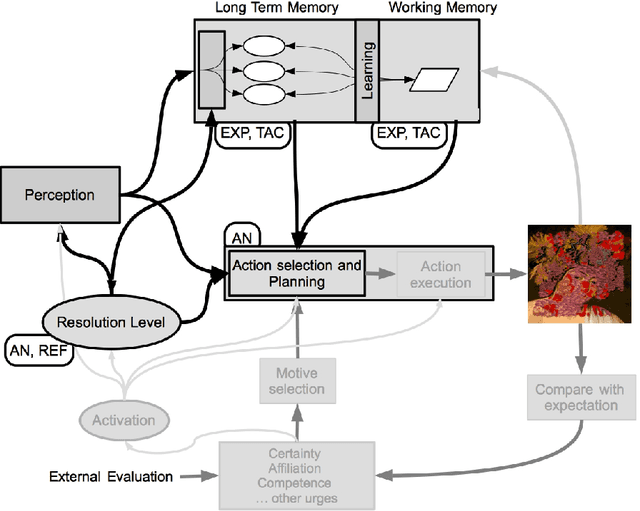
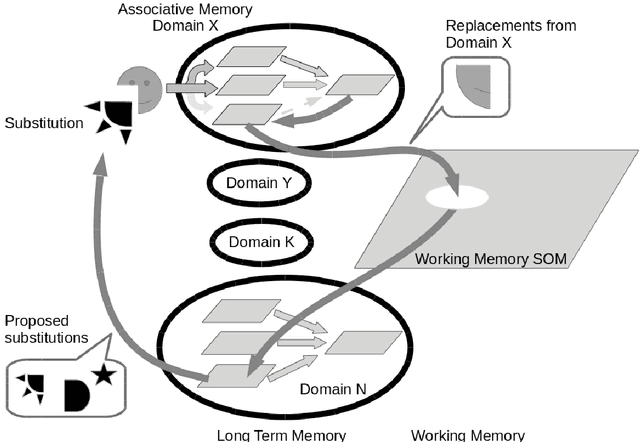

The paper proposes a novel cognitive architecture (CA) for computational creativity based on the Psi model and on the mechanisms inspired by dual process theories of reasoning and rationality. In recent years, many cognitive models have focused on dual process theories to better describe and implement complex cognitive skills in artificial agents, but creativity has been approached only at a descriptive level. In previous works we have described various modules of the cognitive architecture that allows a robot to execute creative paintings. By means of dual process theories we refine some relevant mechanisms to obtain artworks, and in particular we explain details about the resolution level of the CA dealing with different strategies of access to the Long Term Memory (LTM) and managing the interaction between S1 and S2 processes of the dual process theory. The creative process involves both divergent and convergent processes in either implicit or explicit manner. This leads to four activities (exploratory, reflective, tacit, and analytic) that, triggered by urges and motivations, generate creative acts. These creative acts exploit both the LTM and the WM in order to make novel substitutions to a perceived image by properly mixing parts of pictures coming from different domains. The paper highlights the role of the interaction between S1 and S2 processes, modulated by the resolution level, which focuses the attention of the creative agent by broadening or narrowing the exploration of novel solutions, or even drawing the solution from a set of already made associations. An example of artificial painter is described in some experimentations by using a robotic platform.