 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Whole-Body Model Predictive Control Scheme Including External Contact Forces and CoM Height Variations
Oct 24, 2018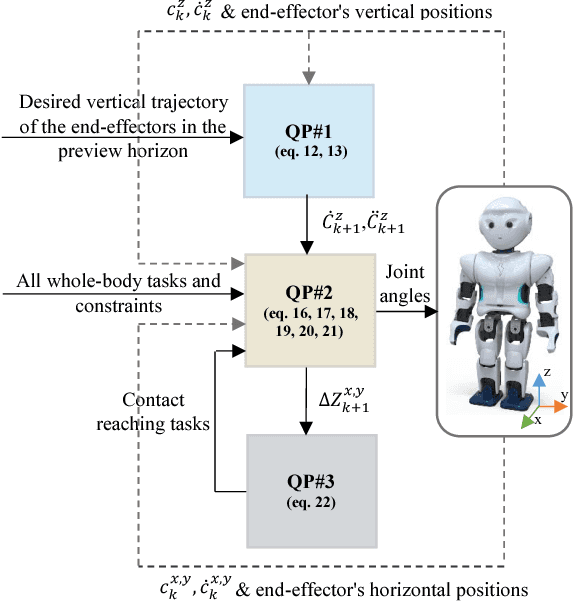
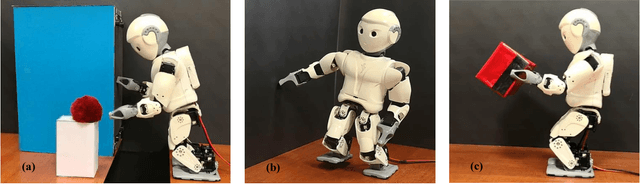

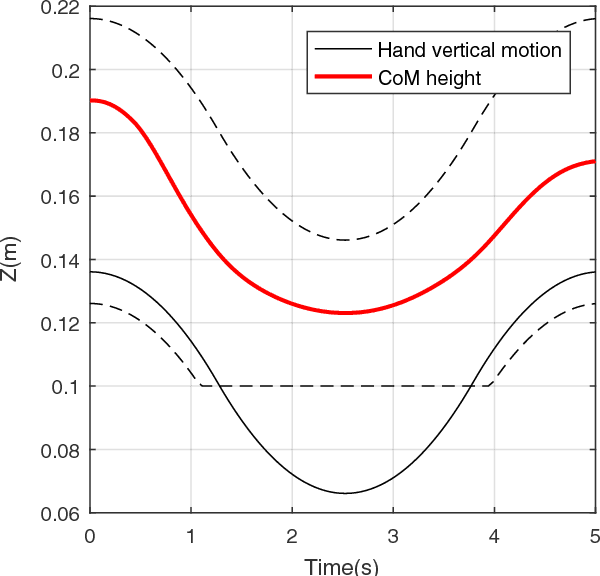
In this paper, we present an approach for generating a variety of whole-body motions for a humanoid robot. We extend the available Model Predictive Control (MPC) approaches for walking on flat terrain to plan for both vertical motion of the Center of Mass (CoM) and external contact forces consistent with a given task. The optimization problem is comprised of three stages, i. e. the CoM vertical motion, joint angles, and contact forces planning. The choice of external contact (e. g. hand contact with the object or environment) among all available locations and the appropriate time to reach and maintain a contact are all computed automatically within the algorithm. The presented algorithm benefits from the simplicity of the Linear Inverted Pendulum Model (LIPM), while it overcomes the common limitations of this model and enables us to generate a variety of whole-body motions through external contacts. Simulation and experimental implementation of several whole-body actions in multi-contact scenarios on a humanoid robot show the capability of the proposed algorithm.
A Reactive and Efficient Walking Pattern Generator for Robust Bipedal Locomotion
Oct 24, 2017
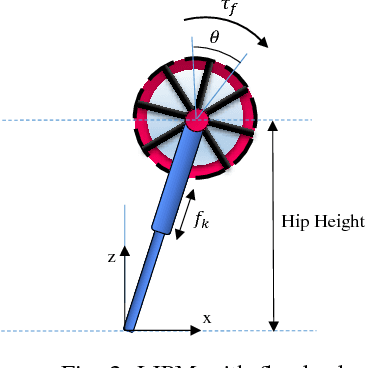
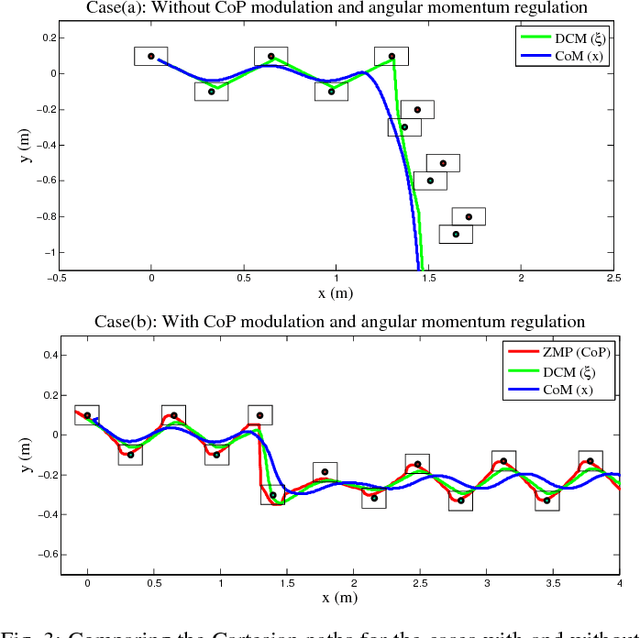

Available possibilities to prevent a biped robot from falling down in the presence of severe disturbances are mainly Center of Pressure (CoP) modulation, step location and timing adjustment, and angular momentum regulation. In this paper, we aim at designing a walking pattern generator which employs an optimal combination of these tools to generate robust gaits. In this approach, first, the next step location and timing are decided consistent with the commanded walking velocity and based on the Divergent Component of Motion (DCM) measurement. This stage which is done by a very small-size Quadratic Program (QP) uses the Linear Inverted Pendulum Model (LIPM) dynamics to adapt the switching contact location and time. Then, consistent with the first stage, the LIPM with flywheel dynamics is used to regenerate the DCM and angular momentum trajectories at each control cycle. This is done by modulating the CoP and Centroidal Momentum Pivot (CMP) to realize a desired DCM at the end of current step. Simulation results show the merit of this reactive approach in generating robust and dynamically consistent walking patterns.