 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBlack-Box Combinatorial Optimization with Order-Invariant Reinforcement Learning
Oct 02, 2025We introduce an order-invariant reinforcement learning framework for black-box combinatorial optimization. Classical estimation-of-distribution algorithms (EDAs) often rely on learning explicit variable dependency graphs, which can be costly and fail to capture complex interactions efficiently. In contrast, we parameterize a multivariate autoregressive generative model trained without a fixed variable ordering. By sampling random generation orders during training - a form of information-preserving dropout - the model is encouraged to be invariant to variable order, promoting search-space diversity and shaping the model to focus on the most relevant variable dependencies, improving sample efficiency. We adapt Generalized Reinforcement Policy Optimization (GRPO) to this setting, providing stable policy-gradient updates from scale-invariant advantages. Across a wide range of benchmark algorithms and problem instances of varying sizes, our method frequently achieves the best performance and consistently avoids catastrophic failures.
Discovering new robust local search algorithms with neuro-evolution
Jan 08, 2025



This paper explores a novel approach aimed at overcoming existing challenges in the realm of local search algorithms. Our aim is to improve the decision process that takes place within a local search algorithm so as to make the best possible transitions in the neighborhood at each iteration. To improve this process, we propose to use a neural network that has the same input information as conventional local search algorithms. In this paper, which is an extension of the work [Goudet et al. 2024] presented at EvoCOP2024, we investigate different ways of representing this information so as to make the algorithm as efficient as possible but also robust to monotonic transformations of the problem objective function. To assess the efficiency of this approach, we develop an experimental setup centered around NK landscape problems, offering the flexibility to adjust problem size and ruggedness. This approach offers a promising avenue for the emergence of new local search algorithms and the improvement of their problem-solving capabilities for black-box problems.
Simulating Non Stationary Operators in Search Algorithms
Sep 05, 2014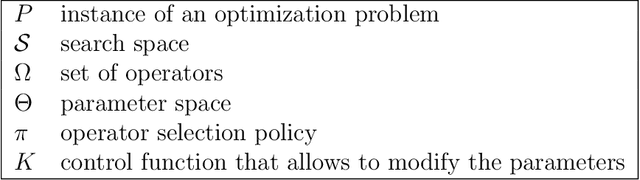

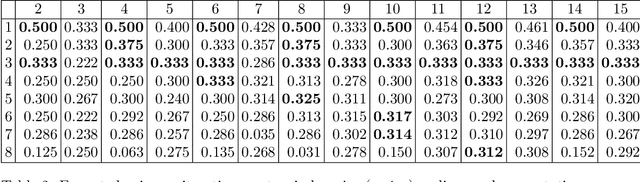

In this paper, we propose a model for simulating search operators whose behaviour often changes continuously during the search. In these scenarios, the performance of the operators decreases when they are applied. This is motivated by the fact that operators for optimization problems are often roughly classified into exploitation operators and exploration operators. Our simulation model is used to compare the different performances of operator selection policies and clearly identify their ability to adapt to such specific operators behaviours. The experimental study provides interesting results on the respective behaviours of operator selection policies when faced to such non stationary search scenarios.