 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHoroballs and the subgradient method
Apr 02, 2024To explore convex optimization on Hadamard spaces, we consider an iteration in the style of a subgradient algorithm. Traditionally, such methods assume that the underlying spaces are manifolds and that the objectives are geodesically convex: the methods are described using tangent spaces and exponential maps. By contrast, our iteration applies in a general Hadamard space, is framed in the underlying space itself, and relies instead on horospherical convexity of the objective level sets. For this restricted class of objectives, we prove a complexity result of the usual form. Notably, the complexity does not depend on a lower bound on the space curvature. We illustrate our subgradient algorithm on the minimal enclosing ball problem in Hadamard spaces.
Survey Descent: A Multipoint Generalization of Gradient Descent for Nonsmooth Optimization
Dec 29, 2021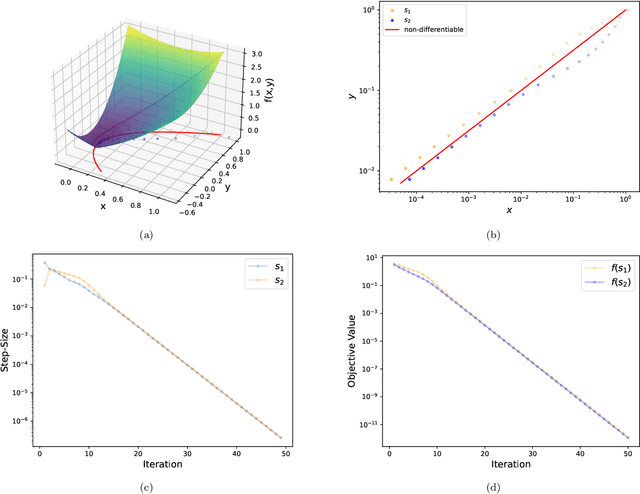
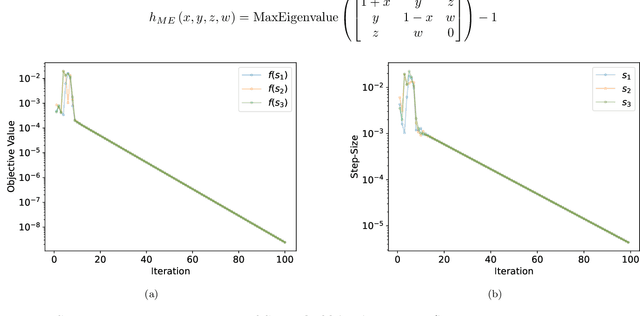
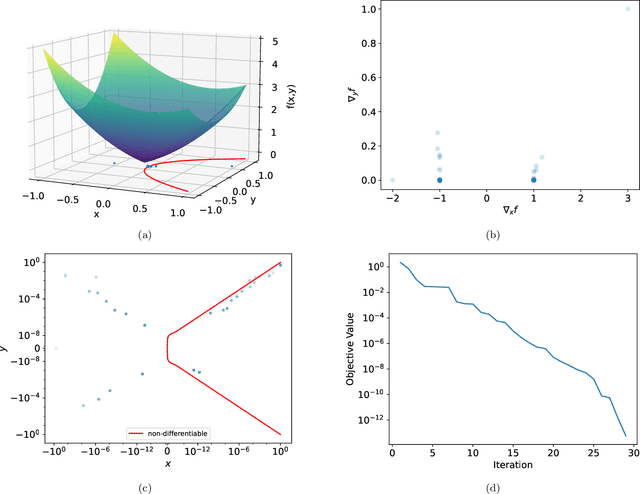
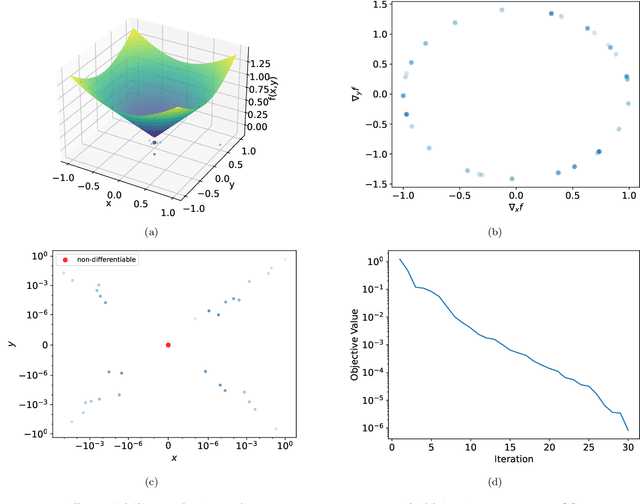
For strongly convex objectives that are smooth, the classical theory of gradient descent ensures linear convergence relative to the number of gradient evaluations. An analogous nonsmooth theory is challenging: even when the objective is smooth at every iterate, the corresponding local models are unstable, and traditional remedies need unpredictably many cutting planes. We instead propose a multipoint generalization of the gradient descent iteration for local optimization. While designed with general objectives in mind, we are motivated by a "max-of-smooth" model that captures subdifferential dimension at optimality. We prove linear convergence when the objective is itself max-of-smooth, and experiments suggest a more general phenomenon.