Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUAV Formation Preservation for Target Tracking Applications
Dec 06, 2021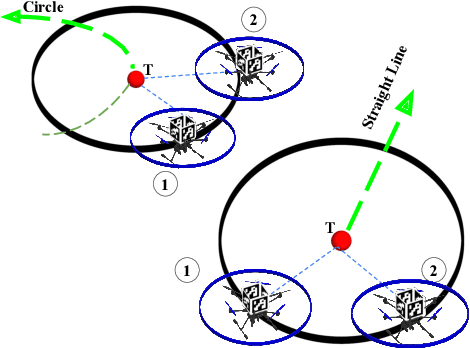
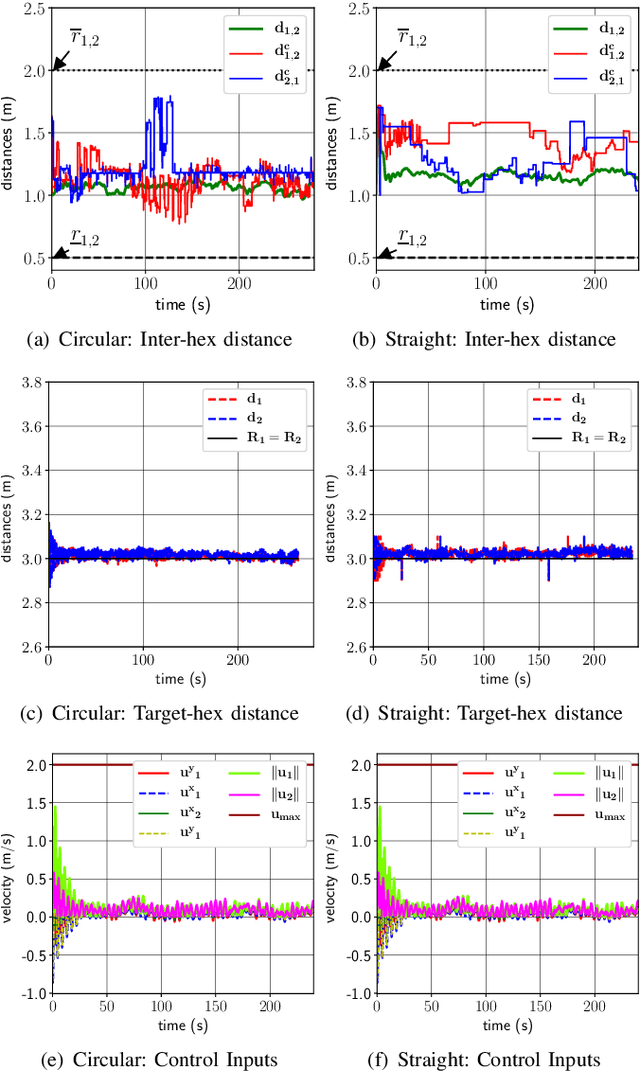
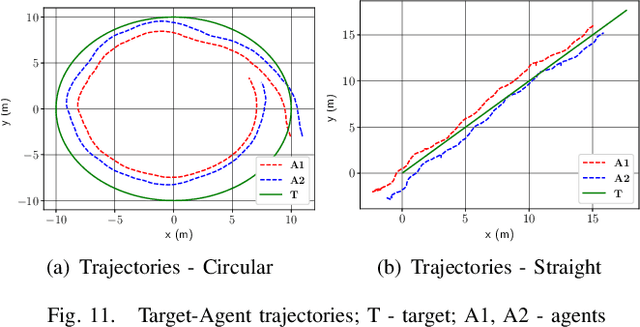
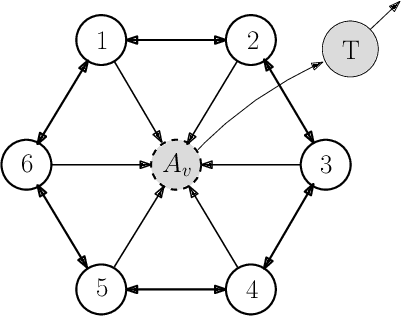
This paper presents a collaborative target tracking application with multiple agents and a formulation of an agent-formation problem with desired inter-agent distances and specified bounds. We propose a barrier Lyapunov function-based distributed control law to preserve the formation for target-tracking and assess its stability using a kinematic model. Numerical results with this model are presented to demonstrate the advantages of the proposed control over a quadratic Lyapunov function-based control. A concluding evaluation using experimental ROS simulations is presented to illustrate the applicability of the proposed control approach to a multi-rotor system and a target executing straight line and circular motion.
* 9 pages, 12 figures
Via