 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic one-time delivery of critical data by small and sparse UAV swarms: a model problem for MARL scaling studies
Dec 10, 2025This work presents a conceptual study on the application of Multi-Agent Reinforcement Learning (MARL) for decentralized control of unmanned aerial vehicles to relay a critical data package to a known position. For this purpose, a family of deterministic games is introduced, designed for scaling studies for MARL. A robust baseline policy is proposed, which is based on restricting agent motion envelopes and applying Dijkstra's algorithm. Experimental results show that two off-the-shelf MARL algorithms perform competitively with the baseline for a small number of agents, but scalability issues arise as the number of agents increase.
A convergent scheme for the Bayesian filtering problem based on the Fokker--Planck equation and deep splitting
Sep 22, 2024A numerical scheme for approximating the nonlinear filtering density is introduced and its convergence rate is established, theoretically under a parabolic H\"{o}rmander condition, and empirically for two examples. For the prediction step, between the noisy and partial measurements at discrete times, the scheme approximates the Fokker--Planck equation with a deep splitting scheme, and performs an exact update through Bayes' formula. This results in a classical prediction-update filtering algorithm that operates online for new observation sequences post-training. The algorithm employs a sampling-based Feynman--Kac approach, designed to mitigate the curse of dimensionality. Our convergence proof relies on the Malliavin integration-by-parts formula. As a corollary we obtain the convergence rate for the approximation of the Fokker--Planck equation alone, disconnected from the filtering problem.
An energy-based deep splitting method for the nonlinear filtering problem
Apr 08, 2022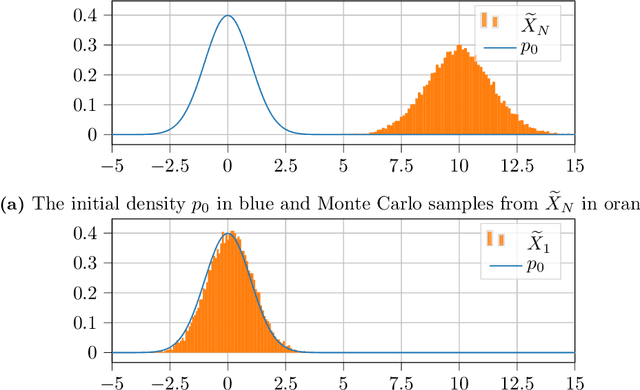
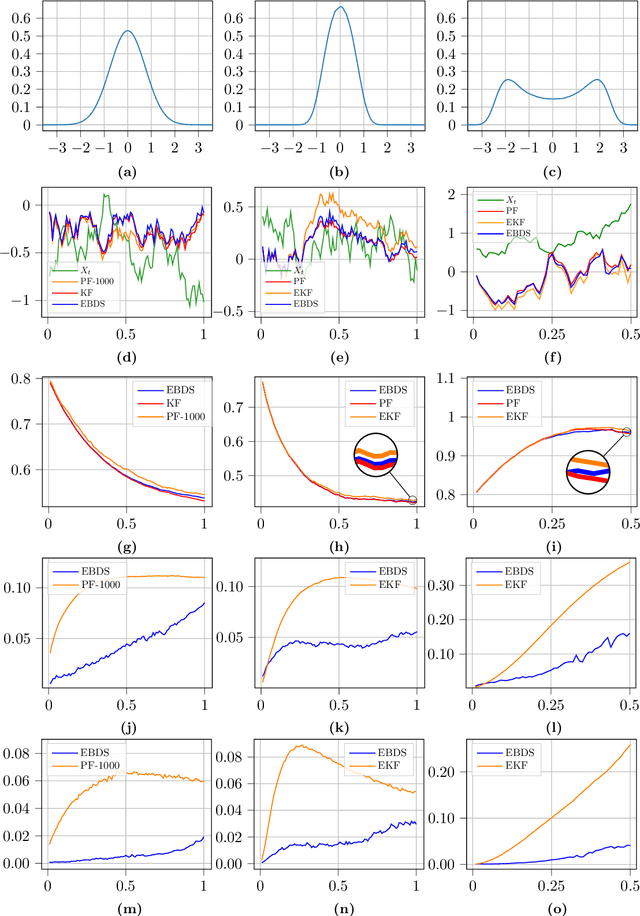
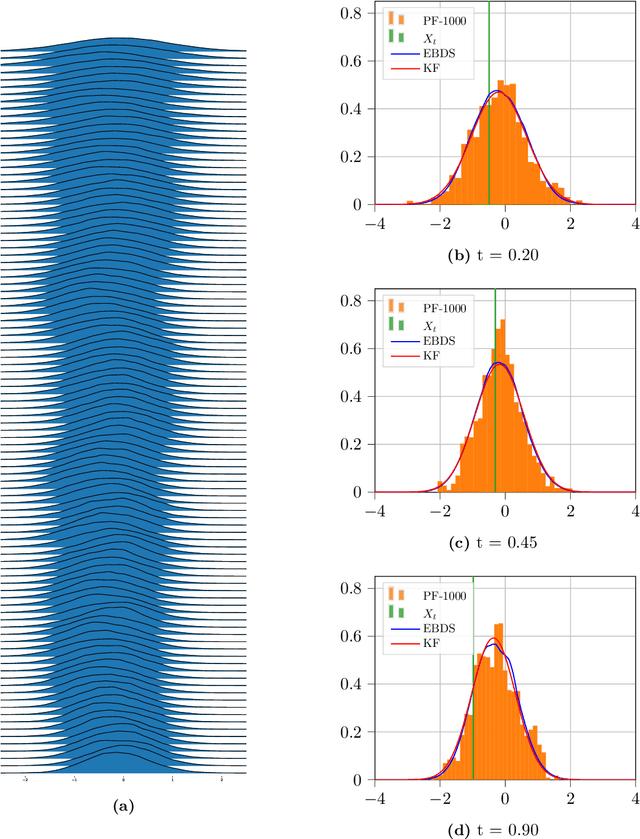
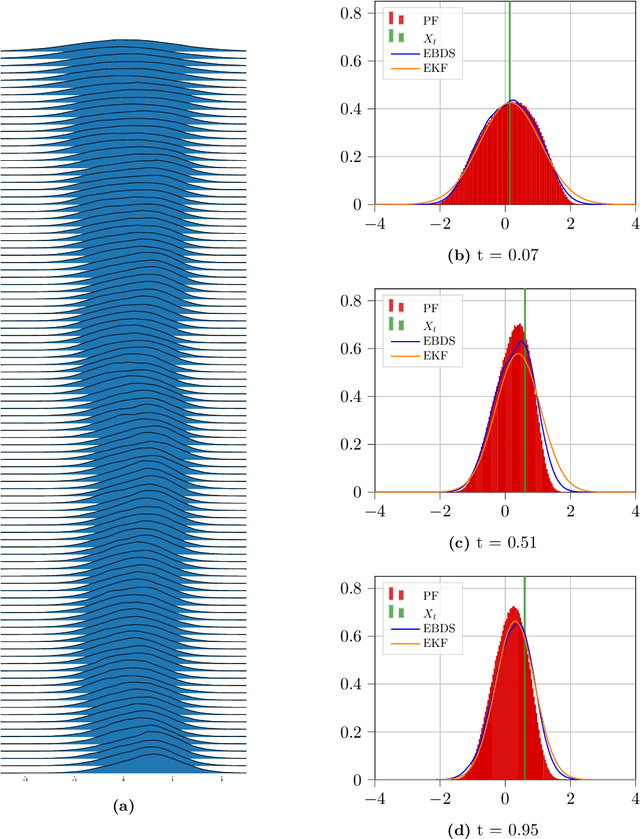
The purpose of this paper is to explore the use of deep learning for the solution of the nonlinear filtering problem. This is achieved by solving the Zakai equation by a deep splitting method, previously developed for approximate solution of (stochastic) partial differential equations. This is combined with an energy-based model for the approximation of functions by a deep neural network. This results in a computationally fast filter that takes observations as input and that does not require re-training when new observations are received. The method is tested on three examples, one linear Gaussian and two nonlinear. The method shows promising performance when benchmarked against the Kalman filter and the bootstrap particle filter.
Convergence of a robust deep FBSDE method for stochastic control
Feb 06, 2022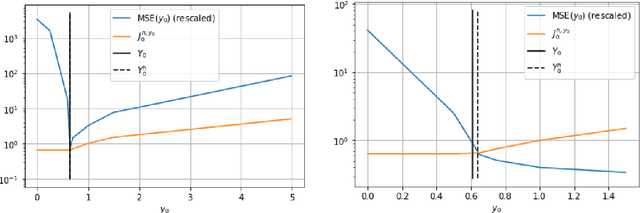



In this paper we propose a deep learning based numerical scheme for strongly coupled FBSDE, stemming from stochastic control. It is a modification of the deep BSDE method in which the initial value to the backward equation is not a free parameter, and with a new loss function being the weighted sum of the cost of the control problem, and a variance term which coincides with the means square error in the terminal condition. We show by a numerical example that a direct extension of the classical deep BSDE method to FBSDE, fails for a simple linear-quadratic control problem, and motivate why the new method works. Under regularity and boundedness assumptions on the exact controls of time continuous and time discrete control problems we provide an error analysis for our method. We show empirically that the method converges for three different problems, one being the one that failed for a direct extension of the deep BSDE method.