 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLAVA: Language Model Assisted Verbal Autopsy for Cause-of-Death Determination
Sep 11, 2025Verbal autopsy (VA) is a critical tool for estimating causes of death in resource-limited settings where medical certification is unavailable. This study presents LA-VA, a proof-of-concept pipeline that combines Large Language Models (LLMs) with traditional algorithmic approaches and embedding-based classification for improved cause-of-death prediction. Using the Population Health Metrics Research Consortium (PHMRC) dataset across three age categories (Adult: 7,580; Child: 1,960; Neonate: 2,438), we evaluate multiple approaches: GPT-5 predictions, LCVA baseline, text embeddings, and meta-learner ensembles. Our results demonstrate that GPT-5 achieves the highest individual performance with average test site accuracies of 48.6% (Adult), 50.5% (Child), and 53.5% (Neonate), outperforming traditional statistical machine learning baselines by 5-10%. Our findings suggest that simple off-the-shelf LLM-assisted approaches could substantially improve verbal autopsy accuracy, with important implications for global health surveillance in low-resource settings.
Fast Variational Bayes for Large Spatial Data
Jul 16, 2025Recent variational Bayes methods for geospatial regression, proposed as an alternative to computationally expensive Markov chain Monte Carlo (MCMC) sampling, have leveraged Nearest Neighbor Gaussian processes (NNGP) to achieve scalability. Yet, these variational methods remain inferior in accuracy and speed compared to spNNGP, the state-of-the-art MCMC-based software for NNGP. We introduce spVarBayes, a suite of fast variational Bayesian approaches for large-scale geospatial data analysis using NNGP. Our contributions are primarily computational. We replace auto-differentiation with a combination of calculus of variations, closed-form gradient updates, and linear response corrections for improved variance estimation. We also accommodate covariates (fixed effects) in the model and offer inference on the variance parameters. Simulation experiments demonstrate that we achieve comparable accuracy to spNNGP but with reduced computational costs, and considerably outperform existing variational inference methods in terms of both accuracy and speed. Analysis of a large forest canopy height dataset illustrates the practical implementation of proposed methods and shows that the inference results are consistent with those obtained from the MCMC approach. The proposed methods are implemented in publicly available Github R-package spVarBayes.
Neural networks for geospatial data
Apr 18, 2023Analysis of geospatial data has traditionally been model-based, with a mean model, customarily specified as a linear regression on the covariates, and a covariance model, encoding the spatial dependence. We relax the strong assumption of linearity and propose embedding neural networks directly within the traditional geostatistical models to accommodate non-linear mean functions while retaining all other advantages including use of Gaussian Processes to explicitly model the spatial covariance, enabling inference on the covariate effect through the mean and on the spatial dependence through the covariance, and offering predictions at new locations via kriging. We propose NN-GLS, a new neural network estimation algorithm for the non-linear mean in GP models that explicitly accounts for the spatial covariance through generalized least squares (GLS), the same loss used in the linear case. We show that NN-GLS admits a representation as a special type of graph neural network (GNN). This connection facilitates use of standard neural network computational techniques for irregular geospatial data, enabling novel and scalable mini-batching, backpropagation, and kriging schemes. Theoretically, we show that NN-GLS will be consistent for irregularly observed spatially correlated data processes. To our knowledge this is the first asymptotic consistency result for any neural network algorithm for spatial data. We demonstrate the methodology through simulated and real datasets.
Random forests for binary geospatial data
Feb 27, 2023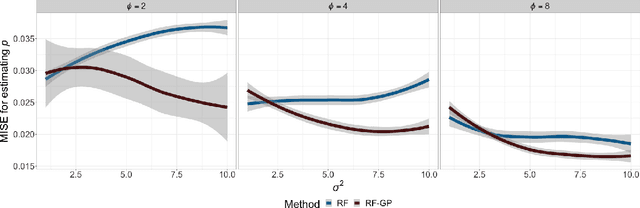



Binary geospatial data is commonly analyzed with generalized linear mixed models, specified with a linear fixed covariate effect and a Gaussian Process (GP)-distributed spatial random effect, relating to the response via a link function. The assumption of linear covariate effects is severely restrictive. Random Forests (RF) are increasingly being used for non-linear modeling of spatial data, but current extensions of RF for binary spatial data depart the mixed model setup, relinquishing inference on the fixed effects and other advantages of using GP. We propose RF-GP, using Random Forests for estimating the non-linear covariate effect and Gaussian Processes for modeling the spatial random effects directly within the generalized mixed model framework. We observe and exploit equivalence of Gini impurity measure and least squares loss to propose an extension of RF for binary data that accounts for the spatial dependence. We then propose a novel link inversion algorithm that leverages the properties of GP to estimate the covariate effects and offer spatial predictions. RF-GP outperforms existing RF methods for estimation and prediction in both simulated and real-world data. We establish consistency of RF-GP for a general class of $\beta$-mixing binary processes that includes common choices like spatial Mat\'ern GP and autoregressive processes.
Random Forests for dependent data
Jul 30, 2020
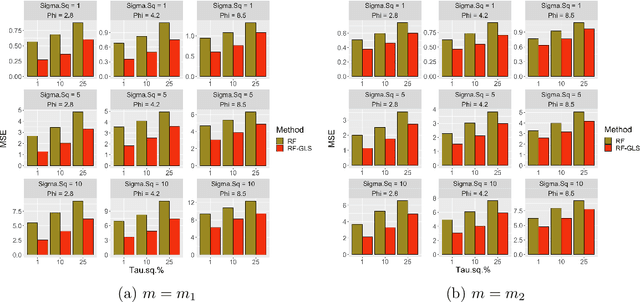
Random forest (RF) is one of the most popular methods for estimating regression functions. The local nature of the RF algorithm, based on intra-node means and variances, is ideal when errors are i.i.d. For dependent error processes like time series and spatial settings where data in all the nodes will be correlated, operating locally ignores this dependence. Also, RF will involve resampling of correlated data, violating the principles of bootstrap. Theoretically, consistency of RF has been established for i.i.d. errors, but little is known about the case of dependent errors. We propose RF-GLS, a novel extension of RF for dependent error processes in the same way Generalized Least Squares (GLS) fundamentally extends Ordinary Least Squares (OLS) for linear models under dependence. The key to this extension is the equivalent representation of the local decision-making in a regression tree as a global OLS optimization which is then replaced with a GLS loss to create a GLS-style regression tree. This also synergistically addresses the resampling issue, as the use of GLS loss amounts to resampling uncorrelated contrasts (pre-whitened data) instead of the correlated data. For spatial settings, RF-GLS can be used in conjunction with Gaussian Process correlated errors to generate kriging predictions at new locations. RF becomes a special case of RF-GLS with an identity working covariance matrix. We establish consistency of RF-GLS under beta- (absolutely regular) mixing error processes and show that this general result subsumes important cases like autoregressive time series and spatial Matern Gaussian Processes. As a byproduct, we also establish consistency of RF for beta-mixing processes, which to our knowledge, is the first such result for RF under dependence. We empirically demonstrate the improvement achieved by RF-GLS over RF for both estimation and prediction under dependence.