 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGroup Validation in Recommender Systems: Framework for Multi-layer Performance Evaluation
Jul 19, 2022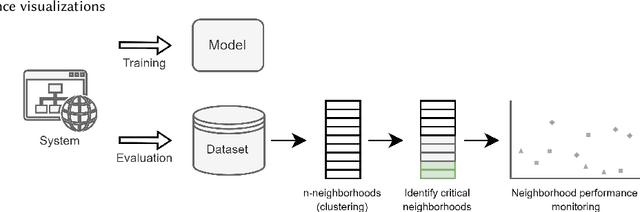

Interpreting the performance results of models that attempt to realize user behavior in platforms that employ recommenders is a big challenge that researchers and practitioners continue to face. Although current evaluation tools possess the capacity to provide solid general overview of a system's performance, they still lack consistency and effectiveness in their use as evident in most recent studies on the topic. Current traditional assessment techniques tend to fail to detect variations that could occur on smaller subsets of the data and lack the ability to explain how such variations affect the overall performance. In this article, we focus on the concept of data clustering for evaluation in recommenders and apply a neighborhood assessment method for the datasets of recommender system applications. This new method, named neighborhood-based evaluation, aids in better understanding critical performance variations in more compact subsets of the system to help spot weaknesses where such variations generally go unnoticed with conventional metrics and are typically averaged out. This new modular evaluation layer complements the existing assessment mechanisms and provides the possibility of several applications to the recommender ecosystem such as model evolution tests, fraud/attack detection and a possibility for hosting a hybrid model setup.
Efficient and accurate monitoring of the depth information in a Wireless Multimedia Sensor Network based surveillance
Jun 25, 2017

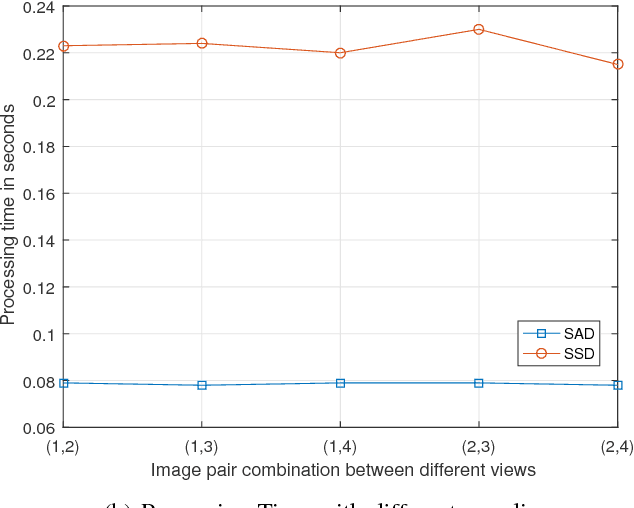
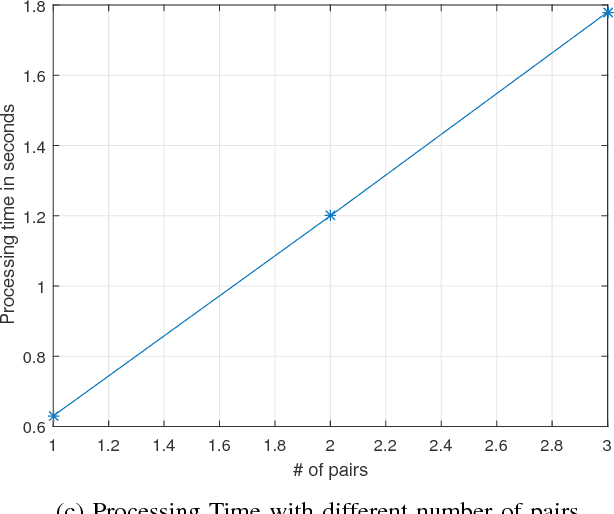
Wireless Multimedia Sensor Network (WMSN) is a promising technology capturing rich multimedia data like audio and video, which can be useful to monitor an environment under surveillance. However, many scenarios in real time monitoring requires 3D depth information. In this research work, we propose to use the disparity map that is computed from two or multiple images, in order to monitor the depth information in an object or event under surveillance using WMSN. Our system is based on distributed wireless sensors allowing us to notably reduce the computational time needed for 3D depth reconstruction, thus permitting the success of real time solutions. Each pair of sensors will capture images for a targeted place/object and will operate a Stereo Matching in order to create a Disparity Map. Disparity maps will give us the ability to decrease traffic on the bandwidth, because they are of low size. This will increase WMSN lifetime. Any event can be detected after computing the depth value for the target object in the scene, and also 3D scene reconstruction can be achieved with a disparity map and some reference(s) image(s) taken by the node(s).