 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiDAR guided Small obstacle Segmentation
Mar 12, 2020
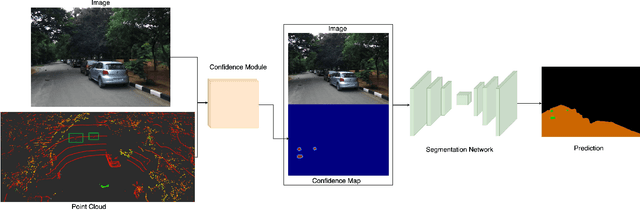


Detecting small obstacles on the road is critical for autonomous driving. In this paper, we present a method to reliably detect such obstacles through a multi-modal framework of sparse LiDAR(VLP-16) and Monocular vision. LiDAR is employed to provide additional context in the form of confidence maps to monocular segmentation networks. We show significant performance gains when the context is fed as an additional input to monocular semantic segmentation frameworks. We further present a new semantic segmentation dataset to the community, comprising of over 3000 image frames with corresponding LiDAR observations. The images come with pixel-wise annotations of three classes off-road, road, and small obstacle. We stress that precise calibration between LiDAR and camera is crucial for this task and thus propose a novel Hausdorff distance based calibration refinement method over extrinsic parameters. As a first benchmark over this dataset, we report our results with 73% instance detection up to a distance of 50 meters on challenging scenarios. Qualitatively by showcasing accurate segmentation of obstacles less than 15 cms at 50m depth and quantitatively through favourable comparisons vis a vis prior art, we vindicate the method's efficacy. Our project-page and Dataset is hosted at https://small-obstacle-dataset.github.io/
An Object-oriented approach to Robotic planning using Taxi domain
Jan 16, 2017

This paper aims to implement Object-Oriented Markov Decision Process (OO-MDPs) for goal planning and navigation of robot in an indoor environment. We use the OO-MDP representation of the environment which is a natural way of modeling the environment based on objects and their interactions. The paper aims to extend the well known Taxi domain example which has been tested on grid world environment to robotics domain with larger state-spaces. For the purpose of this project we have created simulation of the environment and robot in ROS with Gazebo and Rviz as visualization tools.The mobile robot uses a 2D LIDAR module to perform SLAM in the unknown environment. The goal of this project is to be able to make an autonomous agent capable of performing planning and navigation in an indoor environment to deliver boxes (passengers in Taxi domain) placed at random locations to a particular location (warehouse). The approach can be extended to a wide variety of mobile and manipulative robots