 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing Airborne Wind Energy with Reinforcement Learning
Mar 27, 2022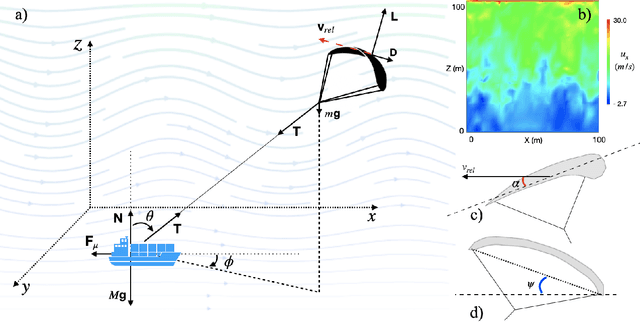

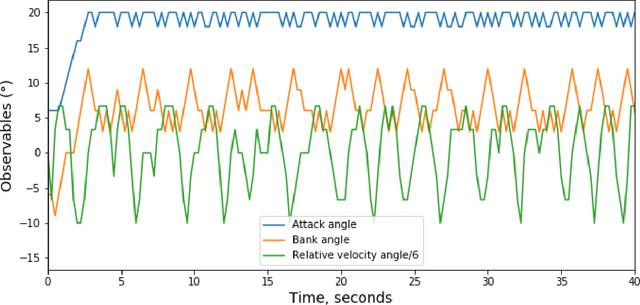

Airborne Wind Energy is a lightweight technology that allows power extraction from the wind using airborne devices such as kites and gliders, where the airfoil orientation can be dynamically controlled in order to maximize performance. The dynamical complexity of turbulent aerodynamics makes this optimization problem unapproachable by conventional methods such as classical control theory, which rely on accurate and tractable analytical models of the dynamical system at hand. Here we propose to attack this problem through Reinforcement Learning, a technique that -- by repeated trial-and-error interactions with the environment -- learns to associate observations with profitable actions without requiring prior knowledge of the system. We show that in a simulated environment Reinforcement Learning finds an efficient way to control a kite so that it can tow a vehicle for long distances. The algorithm we use is based on a small set of intuitive observations and its physically transparent interpretation allows to describe the approximately optimal strategy as a simple list of manoeuvring instructions.
Finding Efficient Swimming Strategies in a Three Dimensional Chaotic Flow by Reinforcement Learning
Dec 31, 2017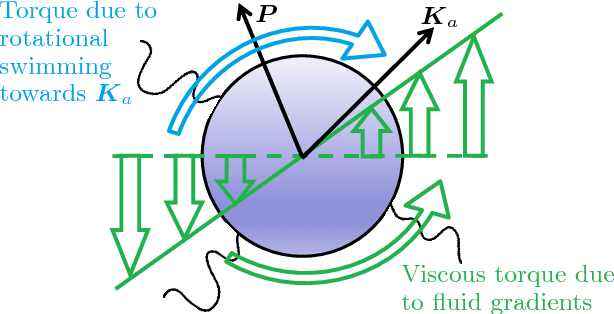
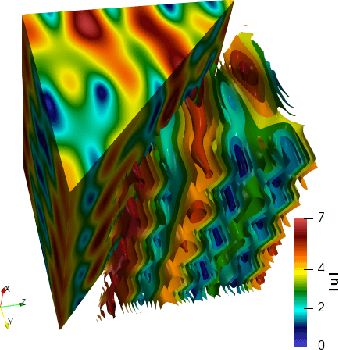
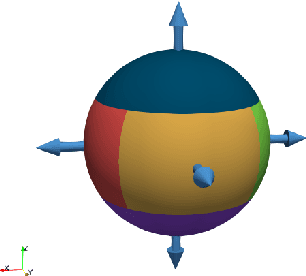
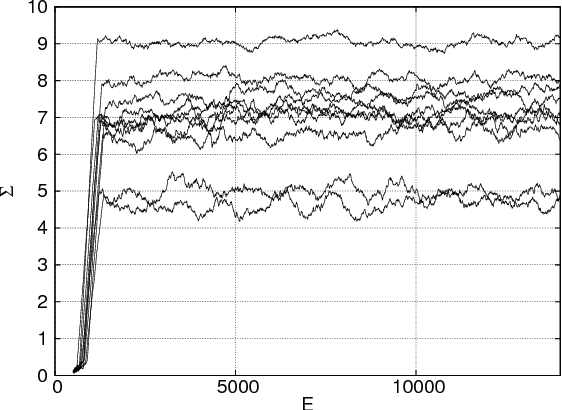
We apply a reinforcement learning algorithm to show how smart particles can learn approximately optimal strategies to navigate in complex flows. In this paper we consider microswimmers in a paradigmatic three-dimensional case given by a stationary superposition of two Arnold-Beltrami-Childress flows with chaotic advection along streamlines. In such a flow, we study the evolution of point-like particles which can decide in which direction to swim, while keeping the velocity amplitude constant. We show that it is sufficient to endow the swimmers with a very restricted set of actions (six fixed swimming directions in our case) to have enough freedom to find efficient strategies to move upward and escape local fluid traps. The key ingredient is the learning-from-experience structure of the algorithm, which assigns positive or negative rewards depending on whether the taken action is, or is not, profitable for the predetermined goal in the long term horizon. This is another example supporting the efficiency of the reinforcement learning approach to learn how to accomplish difficult tasks in complex fluid environments.
* Published on Eur. Phys. J. E (December 14, 2017)