Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeYou Are Here: Geolocation by Embedding Maps and Images
Paper and Code
Nov 20, 2019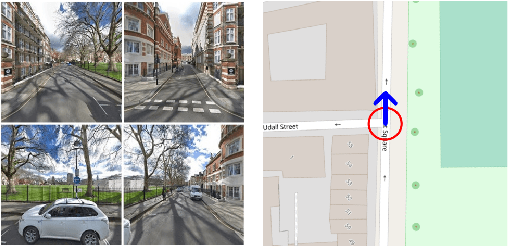
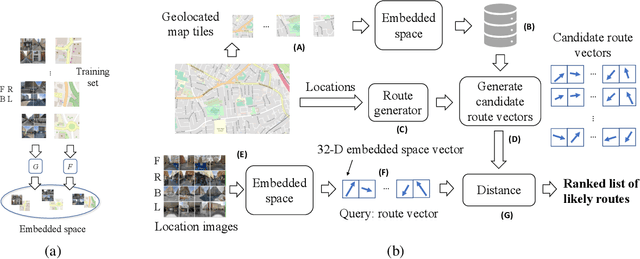
We present a novel approach to geolocating images on a 2-D map based on learning a low dimensional embedded space, which allows a comparison between an image captured at a location and local neighbourhoods of the map. The representation is not sufficiently discriminatory to allow localisation from a single image but when concatenated along a route, localisation converges quickly, with over 90% accuracy being achieved for routes up to 200m in length when using Google Street View and Open Street Map data. The approach generalises a previous fixed semantic feature based approach and achieves faster convergence and higher accuracy without the need for including turn information.
View paper on