 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeYOLOff: You Only Learn Offsets for robust 6DoF object pose estimation
Paper and Code
Feb 25, 2020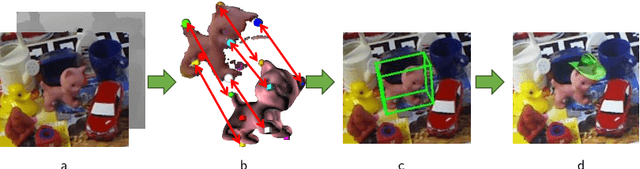

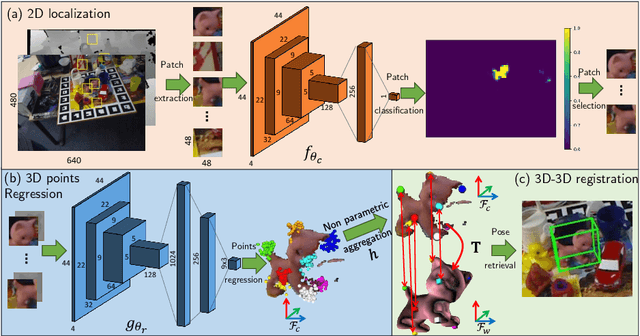
Estimating the 3D translation and orientation of an object is a challenging task that can be considered within augmented reality or robotic applications. In this paper, we propose a novel approach to perform 6 DoF object pose estimation from a single RGB-D image in cluttered scenes. We adopt an hybrid pipeline in two stages: data-driven and geometric respectively. The first data-driven step consists of a classification CNN to estimate the object 2D location in the image from local patches, followed by a regression CNN trained to predict the 3D location of a set of keypoints in the camera coordinate system. We robustly perform local voting to recover the location of each keypoint in the camera coordinate system. To extract the pose information, the geometric step consists in aligning the 3D points in the camera coordinate system with the corresponding 3D points in world coordinate system by minimizing a registration error, thus computing the pose. Our experiments on the standard dataset LineMod show that our approach more robust and accurate than state-of-the-art methods.