Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWorkspace Analysis of the Parallel Module of the VERNE Machine
Paper and Code
Jul 05, 2007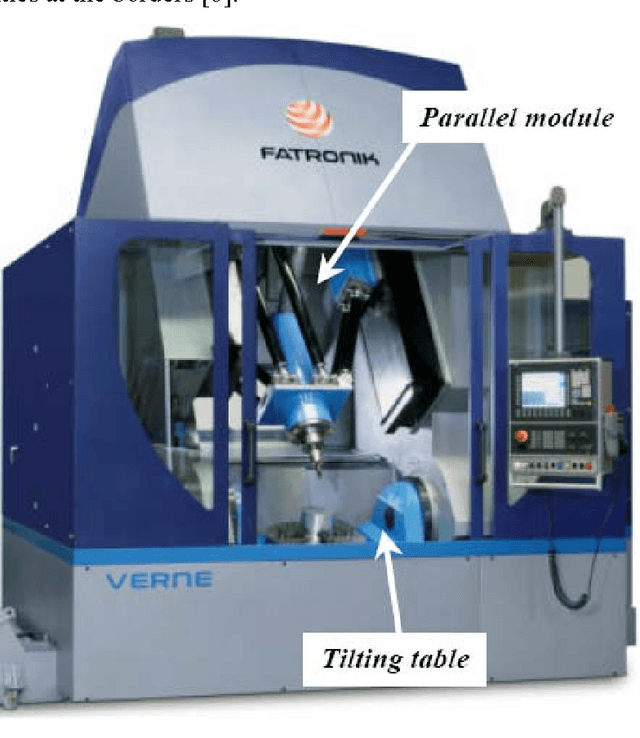



The paper addresses geometric aspects of a spatial three-degree-of-freedom parallel module, which is the parallel module of a hybrid serial-parallel 5-axis machine tool. This parallel module consists of a moving platform that is connected to a fixed base by three non-identical legs. Each leg is made up of one prismatic and two pairs of spherical joint, which are connected in a way that the combined effects of the three legs lead to an over-constrained mechanism with complex motion. This motion is defined as a simultaneous combination of rotation and translation. A method for computing the complete workspace of the VERNE parallel module for various tool lengths is presented. An algorithm describing this method is also introduced.
* Problems of Mechanics 25, 4 (01/12/2006) 26-42
View paper on