Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhen Neural Networks Using Different Sensors Create Similar Features
Paper and Code
Nov 04, 2021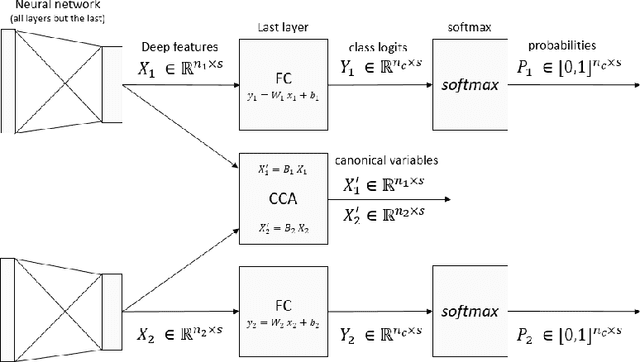
Multimodal problems are omnipresent in the real world: autonomous driving, robotic grasping, scene understanding, etc... We draw from the well-developed analysis of similarity to provide an example of a problem where neural networks are trained from different sensors, and where the features extracted from these sensors still carry similar information. More precisely, we demonstrate that for each sensor, the linear combination of the features from the last layer that correlates the most with other sensors corresponds to the classification components of the classification layer.
* EAI MobiCase 2021, Nov 2021, Online, China
View paper on