 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWheelchair automation by a hybrid BCI system using SSVEP and eye blinks
Paper and Code
Jun 10, 2021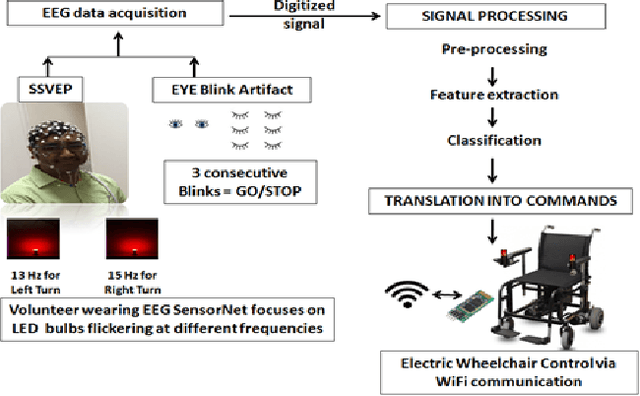
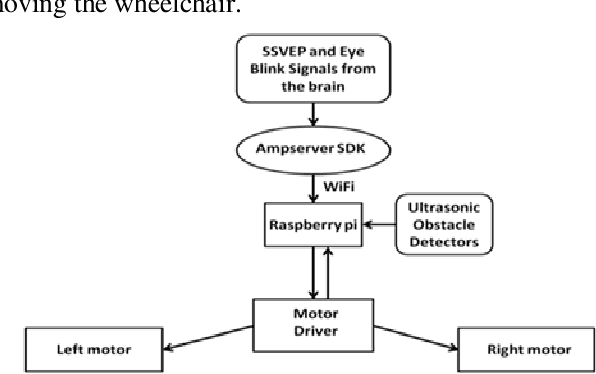
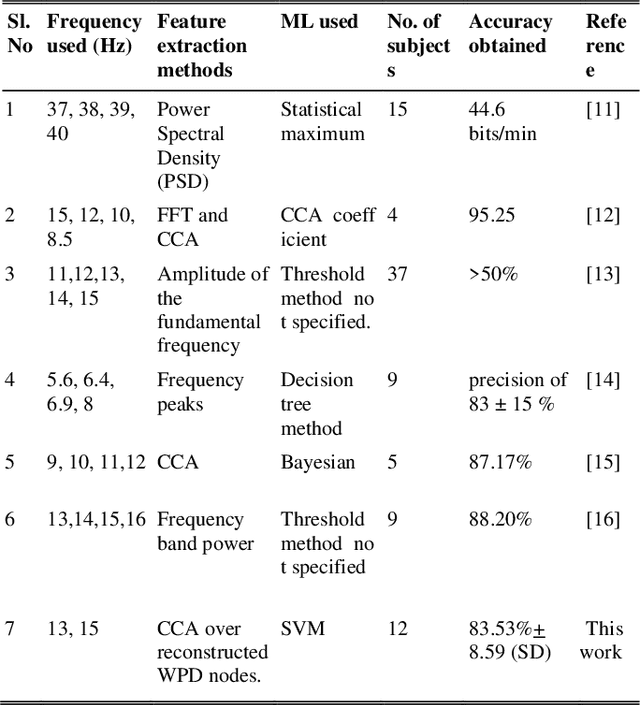
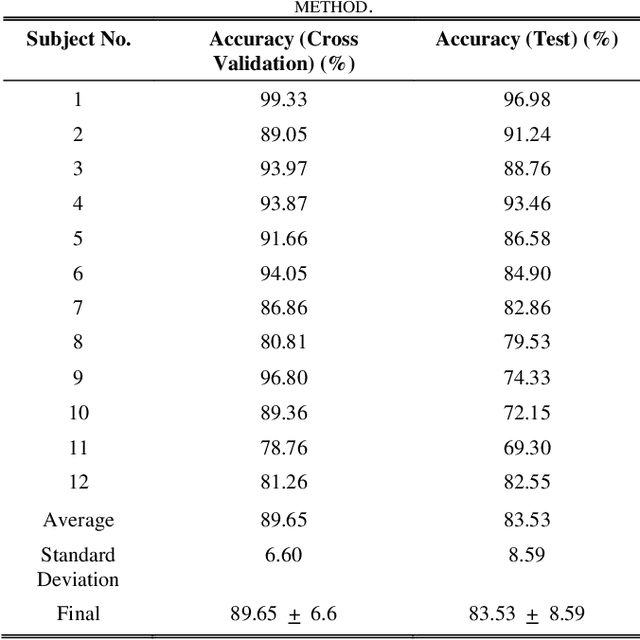
This work proposes a hybrid Brain Computer Interface system for the automation of a wheelchair for the disabled. Herein a working prototype of a BCI-based wheelchair is detailed that can navigate inside a typical home environment with minimum structural modification and without any visual obstruction and discomfort to the user. The prototype is based on a combined mechanism of steady-state visually evoked potential and eye blinks. To elicit SSVEP, LEDs flickering at 13Hz and 15Hz were used to select the left and right direction, respectively, and EEG data was recorded. In addition, the occurrence of three continuous blinks was used as an indicator for stopping an ongoing action. The wavelet packet denoising method was applied, followed by feature extraction methods such as Wavelet Packet Decomposition and Canonical Correlation Analysis over narrowband reconstructed EEG signals. Bayesian optimization was used to obtain 5 fold cross-validations to optimize the hyperparameters of the Support Vector Machine. The resulting new model was tested and the average cross-validation accuracy 89.65% + 6.6% (SD) and testing accuracy 83.53% + 8.59% (SD) were obtained. The wheelchair was controlled by RaspberryPi through WiFi. The developed prototype demonstrated an average of 86.97% success rate for all trials with 4.015s for each command execution. The prototype can be used efficiently in a home environment without causing any discomfort to the user.