 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat went wrong?: Identification of Everyday Object Manipulation Anomalies
Paper and Code
Jan 24, 2020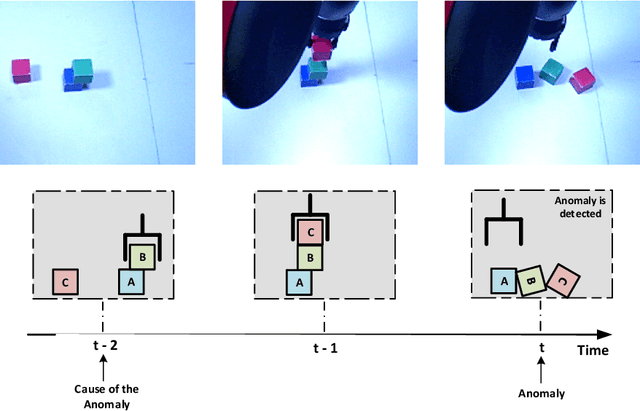
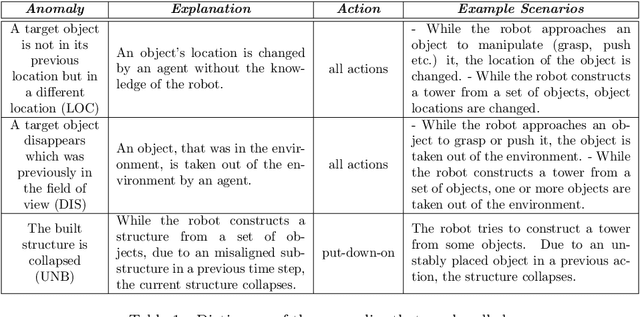
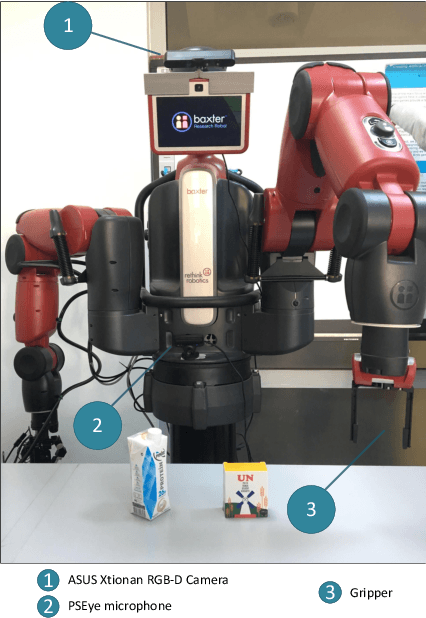
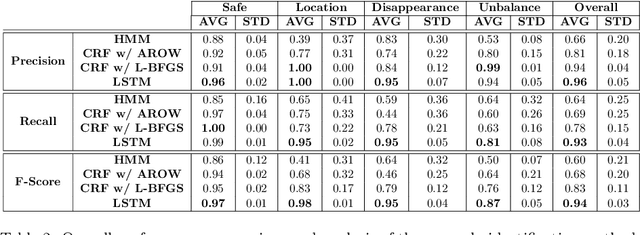
Extending the abilities of service robots is important for expanding what they can achieve in everyday manipulation tasks. On the other hand, it is also essential to ensure them to determine what they can not achieve in certain cases due to either anomalies or permanent failures during task execution. Robots need to identify these situations, and reveal the reasons behind these cases to overcome and recover from them. In this paper, we propose and analyze a Long Short-Term Memories-based (LSTM-based) awareness approach to reveal the reasons behind an anomaly case that occurs during a manipulation episode in an unstructured environment. The proposed method takes into account the real-time observations of the robot by fusing visual, auditory and proprioceptive sensory modalities to achieve this task. We also provide a comparative analysis of our method with Hidden Markov Models (HMMs) and Conditional Random Fields (CRFs). The symptoms of anomalies are first learned from a given training set, then they can be classified in real-time based on the learned models. The approaches are evaluated on a Baxter robot executing object manipulation scenarios. The results indicate that the LSTM-based method outperforms the other methods with a 0.94 classification rate in revealing causes of anomalies in case of an unexpected deviation.