 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat's the Plan? Evaluating and Developing Planning-Aware Techniques for LLMs
Paper and Code



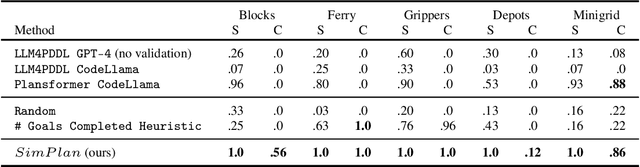
Planning is a fundamental task in artificial intelligence that involves finding a sequence of actions that achieve a specified goal in a given environment. Large language models (LLMs) are increasingly used for applications that require planning capabilities, such as web or embodied agents. In line with recent studies, we demonstrate through experimentation that LLMs lack necessary skills required for planning. Based on these observations, we advocate for the potential of a hybrid approach that combines LLMs with classical planning methodology. Then, we introduce SimPlan, a novel hybrid-method, and evaluate its performance in a new challenging setup. Our extensive experiments across various planning domains demonstrate that SimPlan significantly outperforms existing LLM-based planners.