 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat makes visual place recognition easy or hard?
Paper and Code
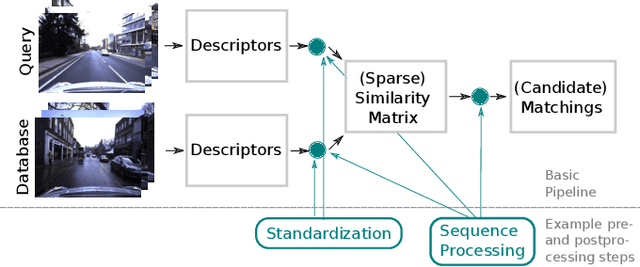

Visual place recognition is a fundamental capability for the localization of mobile robots. It places image retrieval in the practical context of physical agents operating in a physical world. It is an active field of research and many different approaches have been proposed and evaluated in many different experiments. In the following, we argue that due to variations of this practical context and individual design decisions, place recognition experiments are barely comparable across different papers and that there is a variety of properties that can change from one experiment to another. We provide an extensive list of such properties and give examples how they can be used to setup a place recognition experiment easier or harder. This might be interesting for different involved parties: (1) people who just want to select a place recognition approach that is suitable for the properties of their particular task at hand, (2) researchers that look for open research questions and are interested in particularly difficult instances, (3) authors that want to create reproducible papers on this topic, and (4) also reviewers that have the task to identify potential problems in papers under review.