 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWearable Roller Rings to Enable Robot Dexterous In-Hand Manipulation through Active Surfaces
Paper and Code
Mar 19, 2024
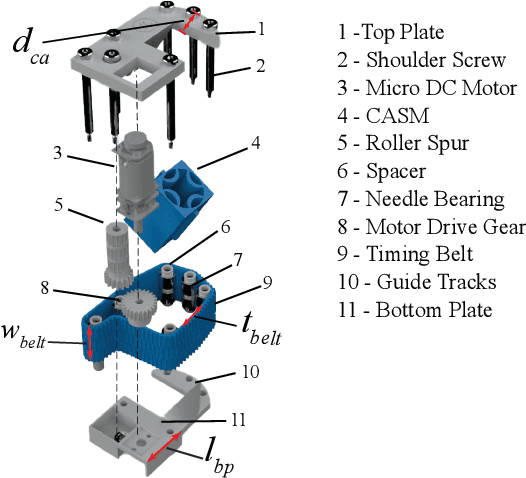
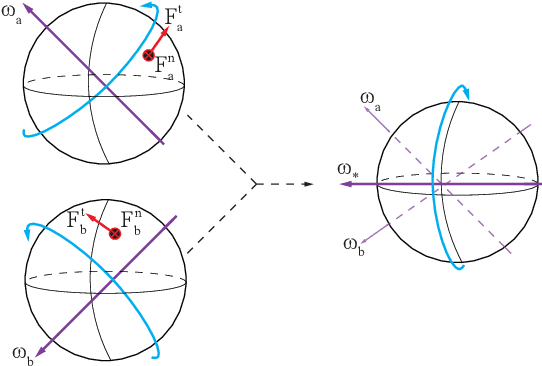
In-hand manipulation is a crucial ability for reorienting and repositioning objects within grasps. The main challenges are not only the complexity in the computational models, but also the risks of grasp instability caused by active finger motions, such as rolling, sliding, breaking, and remaking contacts. Based on the idea of manipulation without lifting a finger, this paper presents the development of Roller Rings (RR), a modular robotic attachment with active surfaces that is wearable by both robot and human hands. By installing and angling the RRs on grasping systems, such that their spatial motions are not co-linear, we derive a general differential motion model for the object actuated by the active surfaces. Our motion model shows that complete in-hand manipulation skill sets can be provided by as few as only 2 RRs through non-holonomic object motions, while more RRs can enable enhanced manipulation dexterity with fewer motion constraints. Through extensive experiments, we wear RRs on both a robot hand and a human hand to evaluate their manipulation capabilities, and show that the RRs can be employed to manipulate arbitrary object shapes to provide dexterous in-hand manipulation.