 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWalking = Traversable? : Traversability Prediction via Multiple Human Object Tracking under Occlusion
Paper and Code
Sep 30, 2023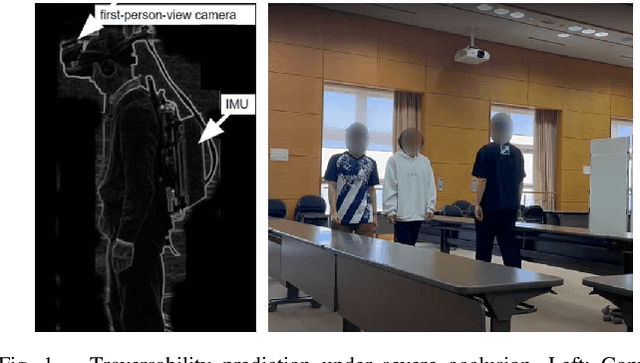
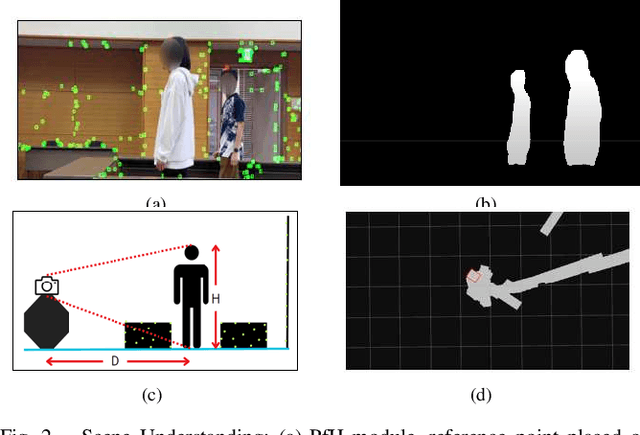
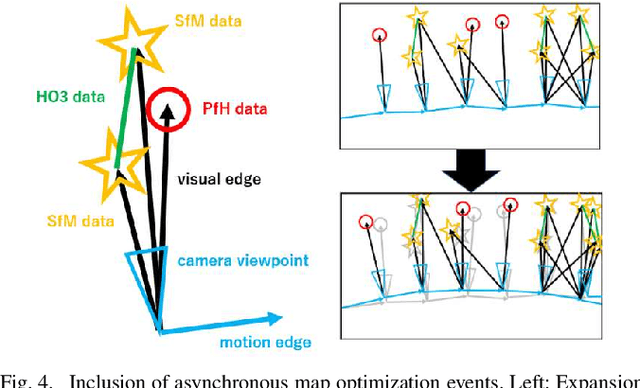
The emerging ``Floor plan from human trails (PfH)" technique has great potential for improving indoor robot navigation by predicting the traversability of occluded floors. This study presents an innovative approach that replaces first-person-view sensors with a third-person-view monocular camera mounted on the observer robot. This approach can gather measurements from multiple humans, expanding its range of applications. The key idea is to use two types of trackers, SLAM and MOT, to monitor stationary objects and moving humans and assess their interactions. This method achieves stable predictions of traversability even in challenging visual scenarios, such as occlusions, nonlinear perspectives, depth uncertainty, and intersections involving multiple humans. Additionally, we extend map quality metrics to apply to traversability maps, facilitating future research. We validate our proposed method through fusion and comparison with established techniques.