 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWalk2Map: Extracting Floor Plans from Indoor Walk Trajectories
Paper and Code
Feb 27, 2021


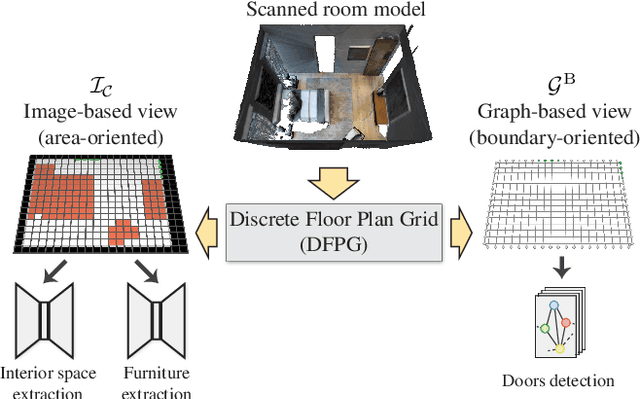
Recent years have seen a proliferation of new digital products for the efficient management of indoor spaces, with important applications like emergency management, virtual property showcasing and interior design. These products rely on accurate 3D models of the environments considered, including information on both architectural and non-permanent elements. These models must be created from measured data such as RGB-D images or 3D point clouds, whose capture and consolidation involves lengthy data workflows. This strongly limits the rate at which 3D models can be produced, preventing the adoption of many digital services for indoor space management. We provide an alternative to such data-intensive procedures by presenting Walk2Map, a data-driven approach to generate floor plans only from trajectories of a person walking inside the rooms. Thanks to recent advances in data-driven inertial odometry, such minimalistic input data can be acquired from the IMU readings of consumer-level smartphones, which allows for an effortless and scalable mapping of real-world indoor spaces. Our work is based on learning the latent relation between an indoor walk trajectory and the information represented in a floor plan: interior space footprint, portals, and furniture. We distinguish between recovering area-related (interior footprint, furniture) and wall-related (doors) information and use two different neural architectures for the two tasks: an image-based Encoder-Decoder and a Graph Convolutional Network, respectively. We train our networks using scanned 3D indoor models and apply them in a cascaded fashion on an indoor walk trajectory at inference time. We perform a qualitative and quantitative evaluation using both simulated and measured, real-world trajectories, and compare against a baseline method for image-to-image translation. The experiments confirm the feasibility of our approach.