 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVoronoi-Based Coverage Control of Heterogeneous Disk-Shaped Robots
Paper and Code
Sep 13, 2015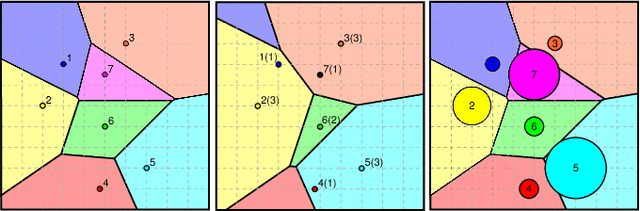
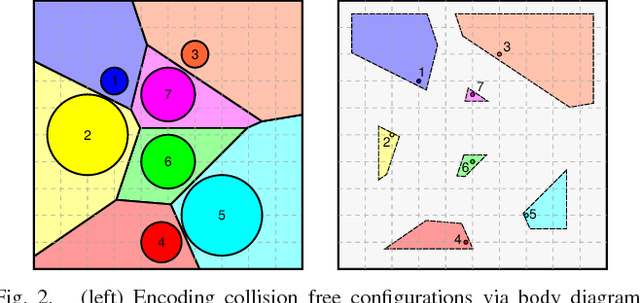
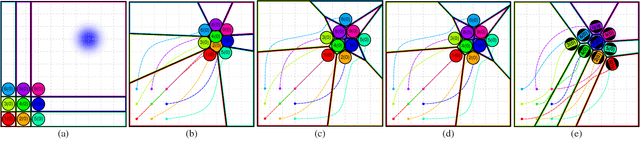
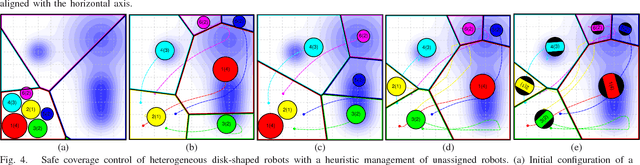
In distributed mobile sensing applications, networks of agents that are heterogeneous respecting both actuation as well as body and sensory footprint are often modelled by recourse to power diagrams --- generalized Voronoi diagrams with additive weights. In this paper we adapt the body power diagram to introduce its "free subdiagram," generating a vector field planner that solves the combined sensory coverage and collision avoidance problem via continuous evaluation of an associated constrained optimization problem. We propose practical extensions (a heuristic congestion manager that speeds convergence and a lift of the point particle controller to the more practical differential drive kinematics) that maintain the convergence and collision guarantees.