 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVoluntary Retreat for Decentralized Interference Reduction in Robot Swarms
Paper and Code
Mar 10, 2019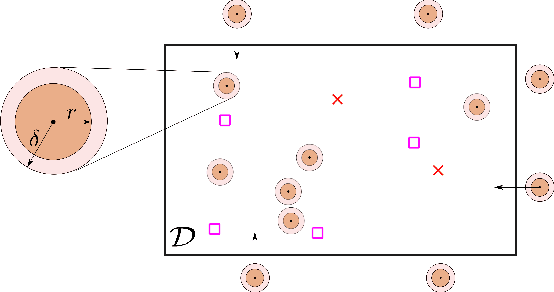

In densely-packed robot swarms operating in confined regions, spatial interference -- which manifests itself as a competition for physical space -- forces robots to spend more time navigating around each other rather than performing the primary task. This paper develops a decentralized algorithm that enables individual robots to decide whether to stay in the region and contribute to the overall mission, or vacate the region so as to reduce the negative effects that interference has on the overall efficiency of the swarm. We develop this algorithm in the context of a distributed collection task, where a team of robots collect and deposit objects from one set of locations to another in a given region. Robots do not communicate and use only binary information regarding the presence of other robots around them to make the decision to stay or retreat. We illustrate the efficacy of the algorithm with experiments on a team of real robots.