 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVOLDOR: Visual Odometry from Log-logistic Dense Optical flow Residuals
Paper and Code
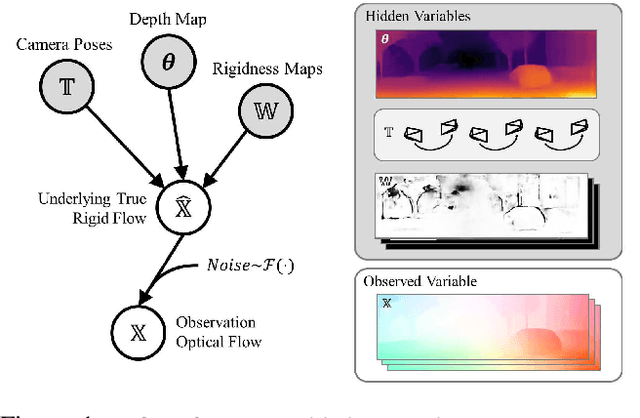
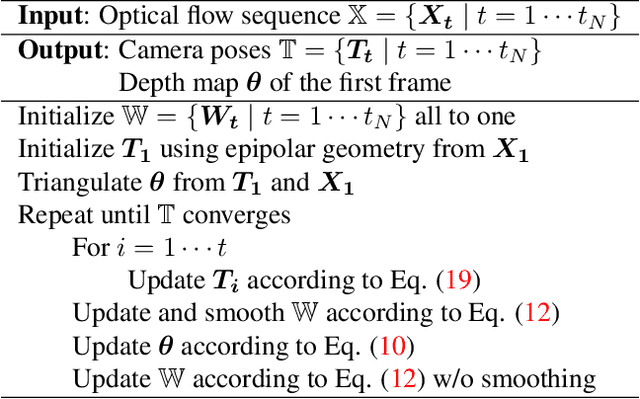
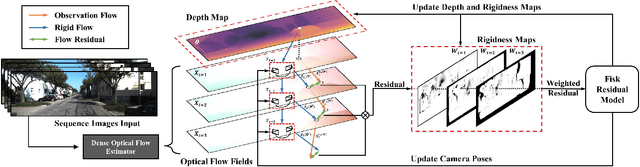
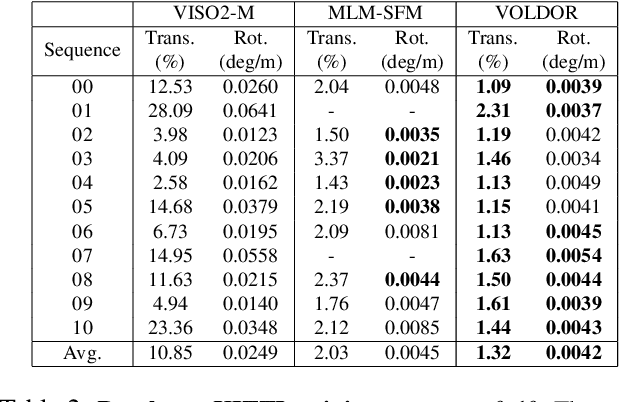
We propose a dense indirect visual odometry method taking as input externally estimated optical flow fields instead of hand-crafted feature correspondences. We define our problem as a probabilistic model and develop a generalized-EM formulation for the joint inference of camera motion, pixel depth, and motion-track confidence. Contrary to traditional methods assuming Gaussian-distributed observation errors, we supervise our inference framework under an (empirically validated) adaptive log-logistic distribution model. Moreover, the log-logistic residual model generalizes well to different state-of-the-art optical flow methods, making our approach modular and agnostic to the choice of optical flow estimators. Our method achieved top-ranking results on both TUM RGB-D and KITTI odometry benchmarks. Our open-sourced implementation is inherently GPU-friendly with only linear computational and storage growth.