 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVITAL: Visual Teleoperation to Enhance Robot Learning through Human-in-the-Loop Corrections
Paper and Code
Jul 30, 2024
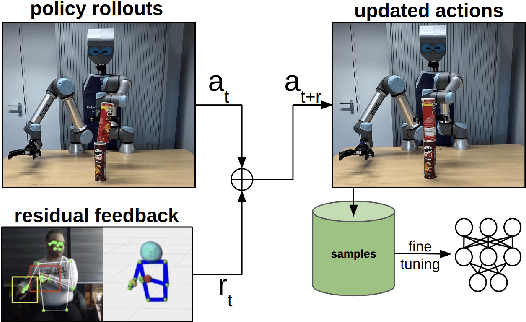
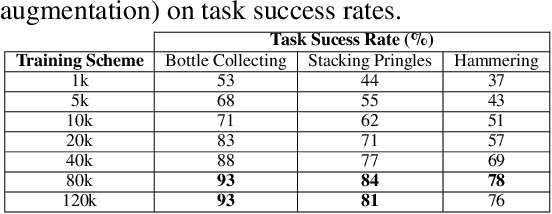
Imitation Learning (IL) has emerged as a powerful approach in robotics, allowing robots to acquire new skills by mimicking human actions. Despite its potential, the data collection process for IL remains a significant challenge due to the logistical difficulties and high costs associated with obtaining high-quality demonstrations. To address these issues, we propose a low-cost visual teleoperation system for bimanual manipulation tasks, called VITAL. Our approach leverages affordable hardware and visual processing techniques to collect demonstrations, which are then augmented to create extensive training datasets for imitation learning. We enhance the generalizability and robustness of the learned policies by utilizing both real and simulated environments and human-in-the-loop corrections. We evaluated our method through several rounds of experiments in simulated and real-robot settings, focusing on tasks of varying complexity, including bottle collecting, stacking objects, and hammering. Our experimental results validate the effectiveness of our approach in learning robust robot policies from simulated data, significantly improved by human-in-the-loop corrections and real-world data integration. Additionally, we demonstrate the framework's capability to generalize to new tasks, such as setting a drink tray, showcasing its adaptability and potential for handling a wide range of real-world bimanual manipulation tasks. A video of the experiments can be found at: https://youtu.be/YeVAMRqRe64?si=R179xDlEGc7nPu8i