 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual SLAM with 3D Gaussian Primitives and Depth Priors Enabling Novel View Synthesis
Paper and Code
Aug 10, 2024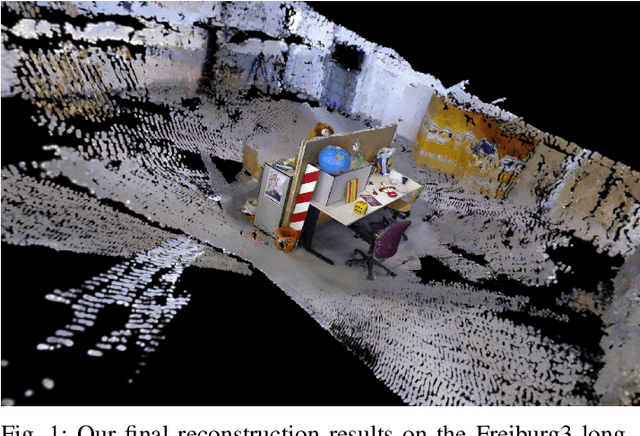

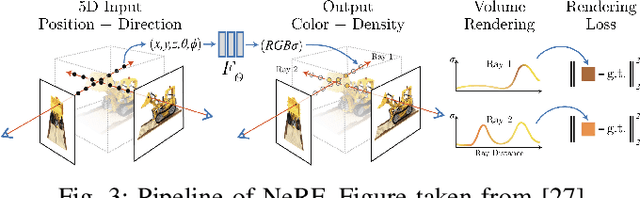

Conventional geometry-based SLAM systems lack dense 3D reconstruction capabilities since their data association usually relies on feature correspondences. Additionally, learning-based SLAM systems often fall short in terms of real-time performance and accuracy. Balancing real-time performance with dense 3D reconstruction capabilities is a challenging problem. In this paper, we propose a real-time RGB-D SLAM system that incorporates a novel view synthesis technique, 3D Gaussian Splatting, for 3D scene representation and pose estimation. This technique leverages the real-time rendering performance of 3D Gaussian Splatting with rasterization and allows for differentiable optimization in real time through CUDA implementation. We also enable mesh reconstruction from 3D Gaussians for explicit dense 3D reconstruction. To estimate accurate camera poses, we utilize a rotation-translation decoupled strategy with inverse optimization. This involves iteratively updating both in several iterations through gradient-based optimization. This process includes differentiably rendering RGB, depth, and silhouette maps and updating the camera parameters to minimize a combined loss of photometric loss, depth geometry loss, and visibility loss, given the existing 3D Gaussian map. However, 3D Gaussian Splatting (3DGS) struggles to accurately represent surfaces due to the multi-view inconsistency of 3D Gaussians, which can lead to reduced accuracy in both camera pose estimation and scene reconstruction. To address this, we utilize depth priors as additional regularization to enforce geometric constraints, thereby improving the accuracy of both pose estimation and 3D reconstruction. We also provide extensive experimental results on public benchmark datasets to demonstrate the effectiveness of our proposed methods in terms of pose accuracy, geometric accuracy, and rendering performance.