 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Object Categorization Based on Hierarchical Shape Motifs Learned From Noisy Point Cloud Decompositions
Paper and Code
Apr 03, 2018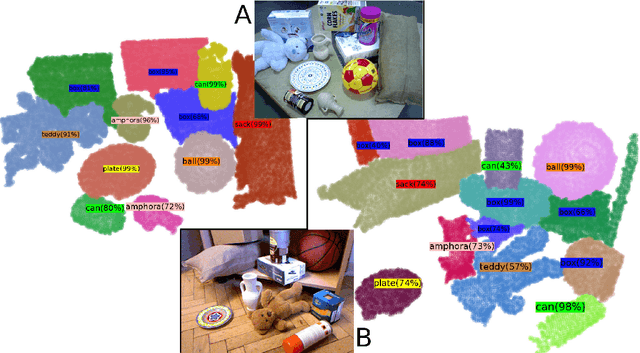
Object shape is a key cue that contributes to the semantic understanding of objects. In this work we focus on the categorization of real-world object point clouds to particular shape types. Therein surface description and representation of object shape structure have significant influence on shape categorization accuracy, when dealing with real-world scenes featuring noisy, partial and occluded object observations. An unsupervised hierarchical learning procedure is utilized here to symbolically describe surface characteristics on multiple semantic levels. Furthermore, a constellation model is proposed that hierarchically decomposes objects. The decompositions are described as constellations of symbols (shape motifs) in a gradual order, hence reflecting shape structure from local to global, i.e., from parts over groups of parts to entire objects. The combination of this multi-level description of surfaces and the hierarchical decomposition of shapes leads to a representation which allows to conceptualize shapes. An object discrimination has been observed in experiments with seven categories featuring instances with sensor noise, occlusions as well as inter-category and intra-category similarities. Experiments include the evaluation of the proposed description and shape decomposition approach, and comparisons to Fast Point Feature Histograms, a Vocabulary Tree and a neural network-based Deep Learning method. Furthermore, experiments are conducted with alternative datasets which analyze the generalization capability of the proposed approach.